

1 引言
设
考虑如下带有双线性耦合项的鞍点问题
这里
其中
注意到, 在问题 (1.1) 和 (1.2) 中涉及到一个双线性函数, 但是在实际应用中许多函数往往不满足双线性性. 因此, 如何研究带非线性二元函数的鞍点问题显得尤为重要. 最近, Zhu 等[12] 考虑了如下鞍点问题
这里
其中
2 预备知识
全文用
问题 (1.4) 的原始问题与对偶问题分别为
为了证明本文的主要结果, 我们需要如下假设.
假设 2.1 对于问题 (1.4), 设存在
并且
注 2.1 假设 2.1 是凸凹极小极大问题中的标准假设. 它保证了强对偶性
假设 2.2 对任意的
假设 2.3 对任意的
由假设 2.1 知问题 (1.4) 的鞍点集非空, 并记为
引理 2.1[1] 设
引理 2.2[14] 设
引理 2.3[14] 对任意
设
取
故问题 (1.4) 的原始对偶间隙函数定义为
显然,
3 提出的算法与收敛性证明
本文提出如下算法
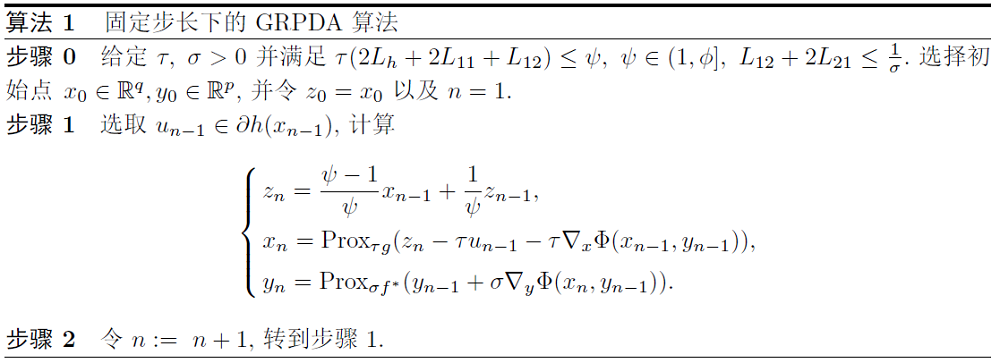
注 3.1 当
注 3.2 算法 1 是完全可分裂的, 即在每次迭代中不依赖于求解任何子问题或线性方程组. 而且算法1 完全不同于文献 [12,算法 1] 的变体 1 (记为 Alg.1(v1)), 本文的算法更加的简洁, 数值效果更好, 见数值实验部分.
为了证明收敛性结果, 我们首先证明如下引理.
引理 3.1 假设
证 由引理 2.1 可得
由
上式结合 (3.2) 式有
又因为
由于
下面给出算法的收敛性证明.
定理 3.1 假设
证 由引理 2.3, 引理 3.1, 假设 2.2 和 Cauchy-Schwarz 不等式得
注意到
由于
则由 (3.3) 和 (3.4) 式可得
因为
令
注意到
显然
因为
下面证明
由于
因此
由此可得
下面给出算法 1 的
定理 3.2 假设
则
证 由 (3.5) 和 (3.6) 式知, 对任意的
上式联合
注 3.3 定理 3.1 从以下两个方面改进了文献 [12,定理 2]
(i) 将
(ii) 本文提出的算法完全不同于文献 [12,算法 1] 的变体 1, 在算法的形式上更为精简. 算法 1 采用了黄金比率凸组合技术, 这可以显著的减少算法的迭代次数与运行时间, 见数值实验部分.
注 3.4 当
4 数值实验
本节给出数值实验, 通过两个例子将本文算法 1 与文献 [12,算法 1] 的变体 1 (记为 Alg.1(v1)) 进行比较. 所有代码均在 MATLAB R2018a 和 Windows10 系统下运行, 计算机基本参数为 Intel(R) Core(TM) i5-8250U CPU@1.60GHz, 其中 “iter” 表示程序迭代次数, “CPU time” 表示程序运行时间, 单位为秒. 算法的终止条件为
例 4.1[12] 考虑如下二次规划问题
其中


参数选取如下
算法 1 设
文献 [12,算法 1] 的变体 1: 设
例 4.2 考虑下述极大极小博弈问题
其中


参数选取如下
算法 1 设
文献 [12,算法 1] 的变体 1 设
例 4.3 考虑下述极大极小问题
其中
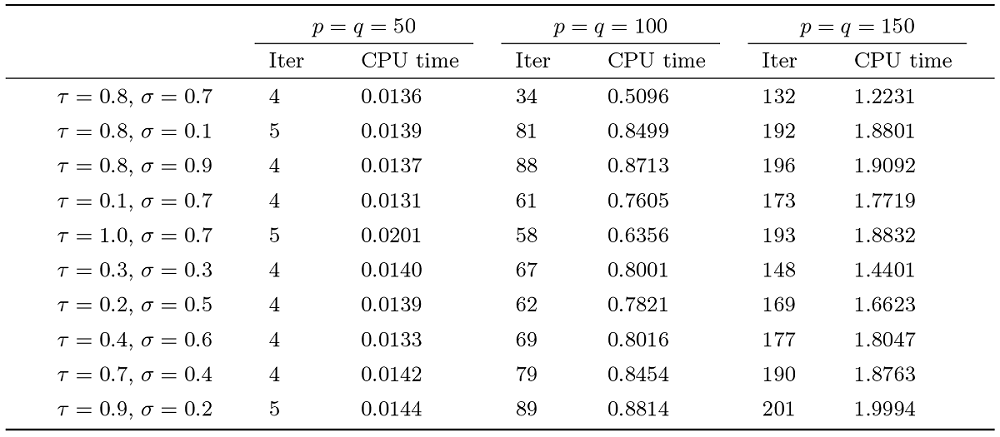
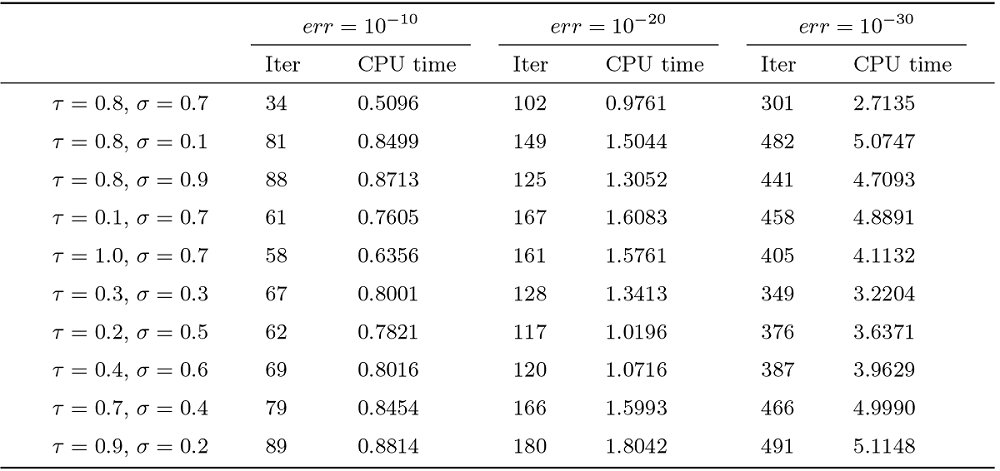
图1
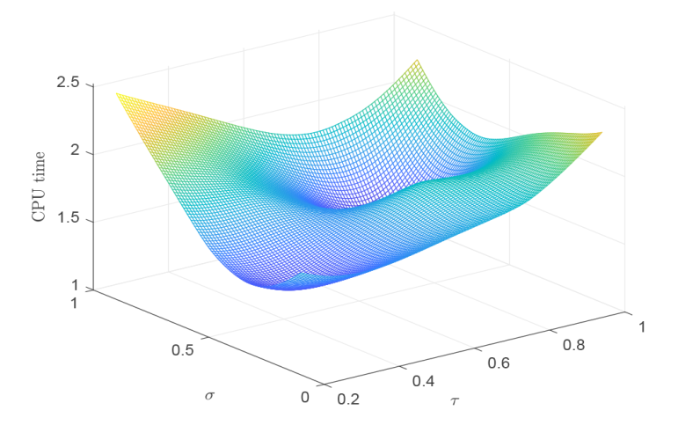
图2
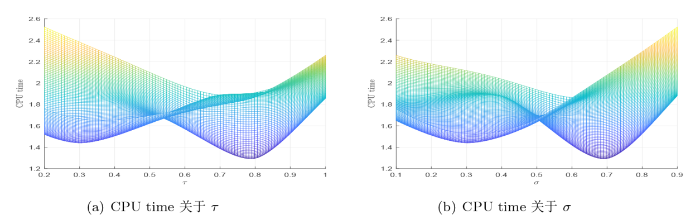
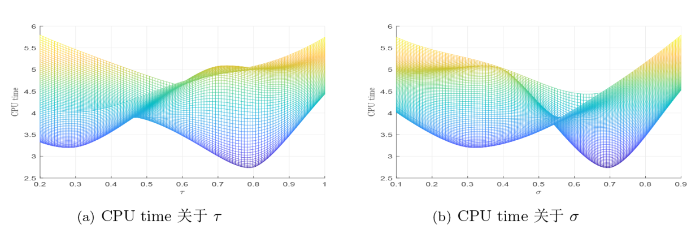
图3

图4
注 4.1 从数值实验的结果来看, 我们有
(i) 算法 1 与文献 [12,算法 1] 的变体 1 都收敛到问题的解.
(v) 算法 1 在
参考文献
A first-order primal-dual algorithm for convex problems with applications to imaging
A general framework for a class of first order primal-dual algorithms for convex optimization in imaging science
On the convergence of primal-dual hybrid gradient algorithm
On the ergodic convergence rates of a first-order primal-dual algorithm
A primal-dual splitting method for convex optimization involving Lipschitzian, proximable and linear composite terms
Golden ratio algorithms for variational inequalities
Iteration complexity of inexact augmented Lagrangian methods for constrained convex programming
一类新的黄金比率原始对偶算法
A new Golden ratio primal-dual algorithm
New primal-dual algorithms for a class of nonsmooth and nonlinear convex-concave minimax problems
A primal-dual algorithm with line search for general convex-concave saddle point problems

{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}