

1 引言
已有一些数学模型对炭疽的传播进行了研究.比如, Hahn和Furniss[3]建立了一个微分方程模型来研究封闭环境中(种群没有出生和死亡)对环境消毒对控制炭疽传播的有效性.近年来, Friedman和Yakubu[4]把文献[3]中的模型拓展为一个偏微分方程模型, 该模型中加入了动物种群的迁移、出生和死亡因素.为了研究炭疽潜伏期的影响, Mushayabasa等[5]建立了一个具有潜伏期的炭疽模型, 研究了模型的动力学行为.此外, Mushayabasa[6]提出了一个具有分布时滞的炭疽模型, 模型中的分布时滞表示动物的不同潜伏期. Saad-Roy等[7]拓展了文献[4]中没有扩散的模型, 给出了炭疽疾病的持久和灭绝性.
2 模型建立
假设动物种群被分为三个仓室:易感者
其中内禀增长率为
为了考虑炭疽爆发的季节性, 假设模型(2.1)中的所有参数均为正的,
对一个连续的
为了避免动物种群灭绝, 在本文中给出如下假设
(
考虑线性系统
由文献[11]中的定理3.2可以得到下面的结论.
引理2.1 假设(H1)成立.则方程(2.2)有一个全局吸引的正的
令
定义系统(2.1)初始值属于集合
引理2.2 对任意的初值
证 给定
因为
根据集合
因此如果
因为对所有的
则系统(2.1)由以下合作系统控制
由比较原理(见文献[13]中定理5.1.1)和引理2.1知,
易得系统(2.1)有一个唯一的无病周期解
其中
令
设
即
这里
令
定义线性算子
由文献[14], 系统(2.1)的基本再生数
定义
则
设
引理2.3
下面证明
引理2.4 令
证 由文献[13]中定理5.1.1知对所有的
结论1 存在
首先证明存在某个
因此对所有的
令
因此
即
因此
结论2 当
令
因此
因为
同理可以证明
由于
引理2.5 令
3 阈值动力学行为
本节研究系统(2.1)的全局动力学行为.下面的结果表明当
令
定理3.1 如果
证 首先考虑下面的扰动线性系统
令
由比较原理和引理2.1知, 当
证毕.
下面的结果表明当
定理3.2 如果
证 令
由系统(2.1)的第三, 第四和第五式易知对任意的
令
因为
结论3 对所有的
反证法.假设存在某个
因为
结论4 对任意的
反证法.假设存在某个
令
因为
由文献[13]中定理5.1.1可得
因此
定义
对任意给定的
如果
情形1 对任意的
由系统(2.1)的第三个方程得,
情形2 存在某个
由系统(2.1)的第三个方程得
对于
由文献[19]中定理4.5, 定义
则
显然,
证毕.
4 自治系统
本节将研究系统(2.1)对应的自治系统, 即假设系统(2.1)中的所有参数为正常数, 时滞
对于系统(4.1), 假设
(
显然系统(4.1)有一个灭绝平衡点
系统(4.1)的正平衡点为
其中
因此当且仅当
定义
易得在
因为方程(4.3)有一个正根
对于无病平衡点
这里
如果
当
因为
其中
定理4.1 如果
现在来分析正平衡点
这里
其中
当
直接计算得
令
其中
定理4.2 如果
利用波动方法[20], 可以得到
定理4.3 令
证 记
动物的总人口
因为
令
则
根据引理2.1的证明可知
是系统(4.12)的正向不变集.与定理3.2的证明类似, 得系统(4.12)是一致持续的, 即存在
对任意的
由系统(4.12)的第一个方程得
由此得
类似地, 由系统(4.12)的第二个和第三个方程得
结合(4.13), (4.14)和(4.15)式, 得
因此,
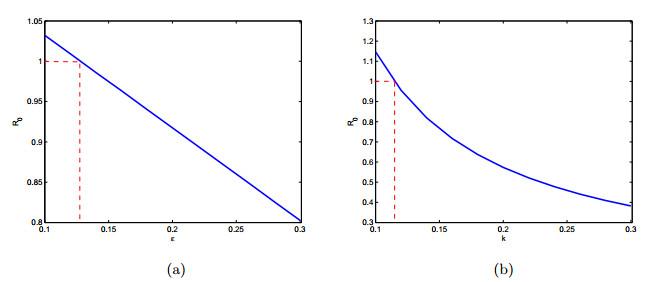
5 数值模拟
本节通过数值拟合来研究潜伏期和季节性对炭疽传播的影响.参数单位为天, 取
根据文献[22]中的引理2.5和注3.2, 可以数值计算基本再生数
图 1
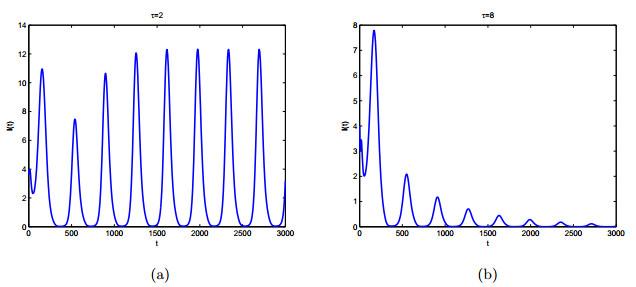
图 2
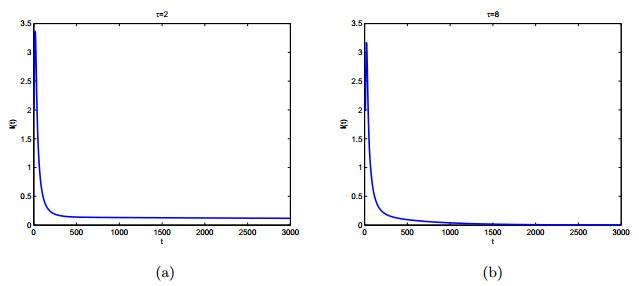
图 3
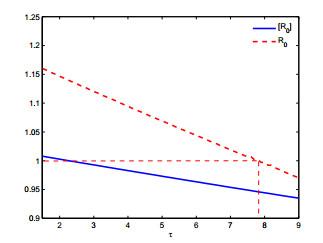
图 4
6 讨论
由于炭疽爆发的季节性, 本文建立了一个周期和时滞的炭疽模型.利用文献[14]得到了模型的基本再生数
在我们的模型中, 忽略了媒介种群的影响, 但事实已经证明, 苍蝇可能在炭疽爆发中发挥了重要的作用[23].食腐动物对炭疽传播的影响也需要进一步进行研究.炭疽对人和动物都有影响, 因此考虑同时具有人和动物的炭疽模型更加合理.人类迁徙很常见, 可能对炭疽传播有很大的影响.这些问题我们留待进一步研究.
参考文献
Anthrax: a guide for livestock producers, Cattle producer's Library CL613
A deterministic model of an anthrax epizootic: threshold results
DOI:10.1016/0304-3800(83)90009-1 [本文引用: 2]
Anthrax epizootic and migration: Persistence or extinction
DOI:10.1016/j.mbs.2012.10.004 [本文引用: 2]
Dynamical analysis and control strategies in modeling anthrax
DOI:10.1007/s40314-015-0297-1 [本文引用: 1]
Dynamics of an anthrax model with distributed delay
DOI:10.1007/s10440-016-0040-y [本文引用: 1]
A mathematical model of anthrax transmission in animal populations
DOI:10.1007/s11538-016-0238-1 [本文引用: 2]
Ecology and epidemiology of anthrax in the Etosha National Park, Namibia
Serologic surveillance of anthrax in the Serengeti ecosystem, Tanzania, 1996-2009
Disease extinction versus persistence in discrete-time epidemic models
DOI:10.1007/s11538-018-0426-2 [本文引用: 1]
Threshold dynamics in a time-delayed periodic SIS epidemic model
Basic reproduction ratios for periodic compartmental models with time delay
DOI:10.1007/s10884-015-9425-2 [本文引用: 4]
On strongly monotone flows
DOI:10.4064/ap-66-1-269-274 [本文引用: 2]
Asymptotic speeds of spread and traveling waves for monotone semiflows with applications
DOI:10.1002/cpa.20154 [本文引用: 1]
Dynamics of a time-delayed Lyme disease model with seasonality
DOI:10.1137/16M1087916 [本文引用: 1]
Global attractors and steady states for uniformly persistent dynamical systems
DOI:10.1137/S0036141003439173 [本文引用: 3]
Global stability for non-monotone delay equations (with application to a model of blood cell production)
DOI:10.1016/j.jde.2011.08.026 [本文引用: 1]
Basic reproduction ratios for periodic abstract functional differential equations (with application to a spatial model for Lyme disease)
DOI:10.1007/s10884-017-9601-7 [本文引用: 1]

{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}