

1 引言
本文考察一类非线性等级结构种群模型的最优收获问题, 系统由两个相互竞争的种群构成. 模型的主要特点是含有所谓“内部环境”, 它依赖于个体年龄并对繁殖率和死亡率产生影响. 粗略而言, 内部环境就是年长者与加权后的年轻者之和, 它依赖于瞬时年龄, 不同年龄的个体所面临的内部环境也不同. 本文力图在具有相互作用的等级结构种群系统控制问题方面取得进展. 下一节描述群落模型与最优控制问题, 第3节证明最优策略的存在性;第4节提出并确立最大值原理, 利用共轭系统和反馈形式刻画最优收获强度. 完成这一任务需要建立一个新的连续性结果. 第5节利用数值方法考察价格变化对最优策略及最优效益的影响, 最后一节总结全文.
2 问题描述
本文考察下列最优控制问题
其中
在以上模型(2.2) 中,
本文假定下述条件成立(
(An1) 对任意
(An2) 对任意
(An3) 对任意
文献[31] 已经证明了如下结论.
引理2.1 对任意给定的
刻画最优策略需要应用下列结果.
引理2.2 系统
证 令
其中
以下假设
根据Bellmann不等式和方程
类似地, 若
由
利用表达式
其中
此外
结合关系式
将
其中
因此
再次应用Gronwall不等式, 即可推出
这意味着
其中常数
3 最优控制的存在性
引理3.1 令
在
证 对于给定的
在系统
由上式和
引理条件保证了
以下运用Fréchet-Kolmogorov定理[32, p275]证明集合
拓展函数
记
其中
关于
另一方面, 解
所以, 环境集
定理3.1 若引理3.1的条件成立, 则控制问题
证 记
考虑任一最大化序列
因
此外, 引理3.1意味着: 存在子序列(仍记为
应用Mazur定理[2, p69]可知: 存在数
使得
定义新的控制序列
易知
由
综合
如果
因此, 假设条件
对方程
利用
从而
另一方面, 由指标泛函定义和控制序列的结构可知
这意味着
4 最大值原理
本节对最优解作精确刻画. 为此先做一些技术准备.
应用不动点方法不难证明以下结果(细节略去).
引理4.1 给定有界函数
类似于引理2.2的证明可得如下结果.
引理4.2 系统
以下证明一个新的连续性结果, 它在刻画最优策略的过程中起关键作用.
引理4.3 令函数
若
证 系统
记系统
令
以下证明本节的主要结果.
定理4.1(最大值原理) 记
如果
那么最优策略
证 对于任意切向量
其中
其中
上述系统中的
首先证明
记
利用方程
其中
引理2.2意味着
因此, 系统(
对于给定的
存在, 且为系统
对系统
将
对于任意
其中
5 数值实验
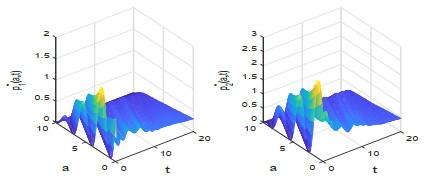
本节根据定理4.1对控制问题(2.1)–(2.2) 做数值求解, 并观察最优收益随价格函数的变化情况.
例5.1 选取参数
初始控制为
死亡率
繁殖率
价格函数(
图 1
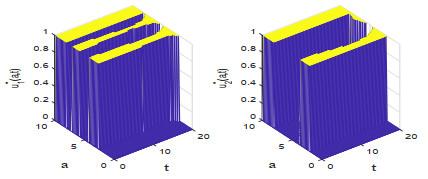
图 2
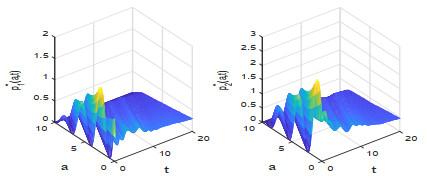
图 3
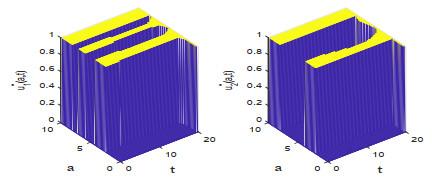
图 4
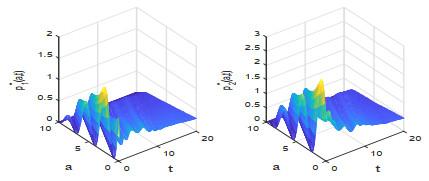
图 5
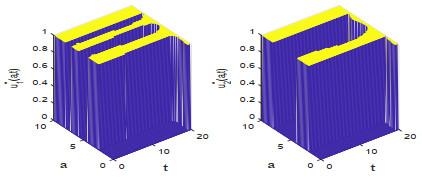
图 6
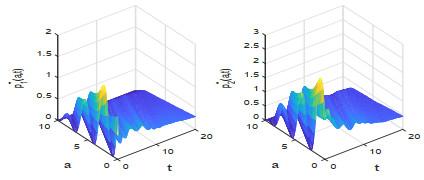
图 7
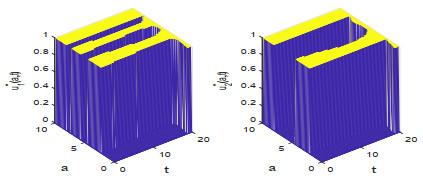
图 8
6 结语
对基于种群系统(
需要强调的是: 尽管表 1中的数据显示最优收益随着价格的上升而增加, 但数据来源于近似计算, 普遍的规律尚不清楚, 因为最优收益由(
参考文献
Optimal harvesting policy for an age-specific population
DOI:10.1016/0025-5564(75)90065-6
Pontryagin's principle for control problems in age-dependent population dynamics
Optimal harvesting in age-structured populations
Study of an optimal control problem for diffusive nonlinear elliptic equations of Logistic type
Optimal age-dependent sustainable harvesting of natural resouece populations: Sustainability value
On the optimal harvesting of persistent age-structured populations
Optimal harvesting of an age-structured population
A problem of optimal harvesting policy in two-stage age-dependent populations
Optimal control of population dynamics
Optimal harvesting in an age-structured predator-prey model
The structure of optimal time- and age-dependent harvesting in the Lotka-McKendrik population model
Optimal harvesting for nonlinear age-dependent population dynamics
Optimal harvesting problem for an age-dependent n-dimensional food chain diffusion model
Optimal harvesting problems for an age-dependent n-dimensional food chain model with diffusion
Opitmal harvesting of two competing species with age dependence
DOI:10.1016/j.nonrwa.2005.04.005 [本文引用: 1]
Optimal harvesting of diffusive models in a nonhomogeneous environment
DOI:10.1016/j.na.2009.04.025 [本文引用: 1]
Dominance rank, copulatory behavior, and differential reproduction
Oscillations caused by cannibalism in a size-structured population model
Asymptotic behaviour of a model of hierarchically structured population dynamics
Existence and uniqueness for height structured hierarchical population models
DOI:10.1111/j.1939-7445.2001.tb00050.x
A discrete hierarchical model of intra-specific competition
DOI:10.1016/S0022-247X(03)00050-7
Monotone approximation for a hierarchical age-structured population model
A high order WENO Scheme for a hierarchical size-structured population model
On the well-posedness of a nonlinear hierarchical size-structured population model
Optimal harvesting of a hierarchical age-structured population system
DOI:10.1142/S1793524519500918 [本文引用: 1]
年龄等级结构两种群系统模型解的存在唯一性
On the system model of two hierarchical age-structured populations

{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}