

1 引言
考虑无约束优化问题
其中
其中
PRP方法自带重启功能, 即算法在迭代过程中一旦出现小步长, 下一步迭代即以最速下降方向进行重启, 从而有效避免算法连续产生小步长, 进而提高算法计算效率. PRP方法这个性质的严格表述最早见文献[8], 并称之为性质(
本文继续研究PRP方法的改进, 目的是建立结构简单、计算效率高、收敛性好的PRP型谱共轭梯度法. 全文余下部分安排如下: 第2部分结合Wolfe线搜索准则对PRP公式进行改进, 并基于新共轭参数设计新的谱参数, 引入重启条件并构造新的重启方向, 建立新算法; 第3部分证明算法的下降性和全局收敛性; 第4部分对算法进行中大规模数值实验并分析报告测试结果.
本节最后给出本文用于产生步长的线搜索准则—强Wolfe线搜索准则, 即
其中
2 改进PRP参数公式和新算法
Dai和Yuan[19]提出一类单参数共轭梯度法簇, 其共轭参数为
显然, 当
受(2.1)式分母结构的启发, 结合强Wolfe线搜索准则(1.2), 本文考虑将PRP公式改进为
显然, 当
谱思想较早出现在Barzilai和Borwein[20]提出的两点步长梯度法(简称BB方法)中, 其每步线搜索仅使用负梯度方向, 即
由(2.3)式不难发现, 若
谱参数
另一方面, Kou和Dai[23]提出一个带新型重启方向的改进三项共轭梯度法(简称KD方法), 其重启方向为
其中
当
基于搜索方向(2.5)及强Wolfe线搜索准则(1.2), 下面给出本文的算法步骤(简记为
初始步 任取初始点
步骤1 若
步骤2 采用强Wolfe线搜索条件(1.2)计算步长
步骤3 按
步骤4 令
3 JLJW+ 算法的下降性和收敛性分析
为了获得
(H1) 目标函数
(H2) 目标函数
以下引理表明, 在强Wolf线搜索条件下,
引理3.1 算法
对
证 当
(i) 当搜索方向
(ii) 当
若
若
由归纳假设, 可知
结合(3.5)和(3.6)式可得
根据(3.4)和(3.7)式可知, 搜索方向
将上式两边同时除以
此结合归纳假设
综合(3.2)和(3.8)式可知充分下降性(3.1)式对
基于
定理3.1 若假设
证 用反证法. 假设
一方面, 由(1.2)式, (3.1)式和假设(H2)可得
进而
另一方面, 由
(i) 当搜索方向
其中
(ii) 当搜索方向
将
根据(3.10)式和(3.12)式可知
其中
将(3.13)式两边同时除以
其中
结合(3.9)和(3.15)式得
另外, 由于
这与调和级数
4 数值试验
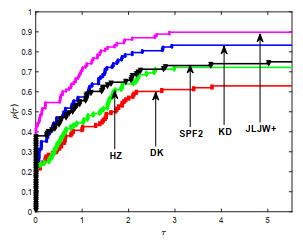
本节, 通过三组数值实验测试新方法的有效性. 第一组, 为测试改进的PRP型方法的有效性, 将JLJW方法与HS方法[1], PRP方法[3, 4]和LS方法[6]进行对比; 第二组, 为测试新型重启方向的有效性, 将
其中
本文算法的终止准则为以下两种情形之一
(1)
(2) 迭代次数
另外, 终止准则(2) 出现时认为该方法对相应例子失效, 并记为"F".
在试验中, 我们分别对迭代次数(Itr), CPU计算时间(Tcpu)及算法终止时梯度值
图 1
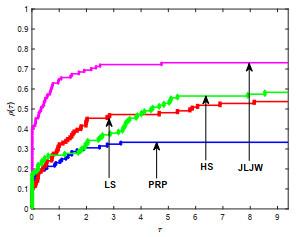
图 2
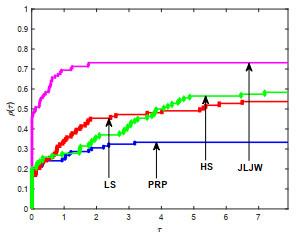
图 3
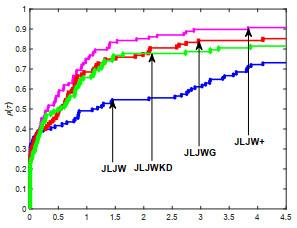
图 4
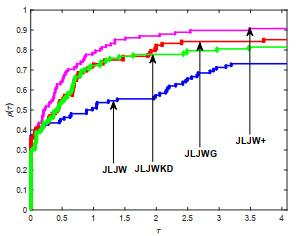
表 1 数值试验报告
| Problems | JLJW+ | KD | DK | HZ | SPF2 |
| Name/n | Itr/Tcpu/||g*|| | Itr/Tcpu/||g*|| | Itr/Tcpu/||g*|| | Itr/Tcpu/||g*|| | Itr/Tcpu/||g*|| |
| bard 3 | 1430/4.93/7.6e-07 | 1565/5.19/8.0e-07 | F/F/3.2e-05 | 620/2.00/4.0e-07 | 235/0.64/6.6e-07 |
| beale 2 | 631/0.96/3.6e-07 | 326/0.52/7.7e-07 | 86/0.11/1.6e-07 | 251/0.37/6.2e-07 | 142/0.20/4.3e-07 |
| box 3 | 150/0.26/2.1e-07 | 330/0.57/6.0e-07 | 134/0.26/1.4e-08 | 475/0.89/8.9e-07 | 91/0.13/5.2e-07 |
| cosine 300 | 19/0.03/5.2e-07 | 26/0.09/3.3e-07 | F/F/1.2e-04 | 32/0.06/4.9e-08 | F/F/3.0e+02 |
| cosine 1500 | 1560/11.26/1.5e-07 | F/F/1.4e+03 | F/F/2.8e+03 | F/F/1.2e+02 | F/F/1.8e+03 |
| cosine 4500 | F/F/2.9e+02 | F/F/5.8e-04 | F/F/1.2e+04 | 477/11.19/2.9e-07 | F/F/2.1e+03 |
| dixmaana 3000 | 18/0.99/3.4e-07 | 17/0.90/3.1e-07 | 23/1.22/6.0e-07 | 26/1.75/1.3e-07 | 24/1.38/1.9e-07 |
| dixmaana 12000 | 18/3.14/6.8e-07 | 17/2.93/6.2e-07 | 25/4.16/1.1e-07 | 21/3.70/1.6e-07 | 24/4.05/3.7e-07 |
| dixmaanb 3000 | 11/0.39/7.4e-07 | 12/0.50/3.3e-07 | 34/1.76/1.7e-07 | 49/3.92/9.6e-08 | 14/0.61/1.5e-07 |
| dixmaanb 12000 | 11/1.17/4.4e-07 | 12/1.51/5.8e-07 | 47/10.10/9.0e-08 | 40/10.30/6.5e-07 | 13/1.55/2.7e-07 |
| dixmaanc 3000 | 24/1.48/3.8e-08 | 25/1.54/5.5e-07 | 29/1.62/2.4e-07 | 33/2.20/1.9e-07 | 35/2.18/8.0e-07 |
| dixmaanc 12000 | 16/2.37/1.0e-06 | 25/4.38/4.5e-07 | 27/4.39/8.2e-07 | 73/18.86/5.6e-07 | 67/15.50/9.6e-07 |
| dixmaand 3000 | 25/1.28/1.3e-07 | 25/1.32/3.6e-07 | 29/1.56/3.3e-07 | 54/4.45/2.3e-07 | 45/2.73/6.7e-07 |
| dixmaand 12000 | 22/3.41/5.5e-07 | 23/3.67/6.5e-07 | 44/8.42/7.7e-07 | 29/5.73/7.2e-07 | 50/10.73/2.7e-07 |
| dixmaane 6000 | 1308/199.45/9.0e-07 | 1229/192.04/9.3e-07 | 1941/331.01/8.5e-07 | 1716/274.31/9.3e-07 | 564/82.65/7.7e-07 |
| dixmaanf 4500 | 775/94.63/8.3e-07 | 1258/161.65/7.9e-07 | 396/53.77/8.5e-07 | 1165/155.96/9.0e-07 | 470/59.77/7.1e-07 |
| dixmaanf 9000 | 1080/237.42/9.3e-07 | 1078/246.31/8.8e-07 | 1396/340.53/9.4e-07 | F/F/1.8e-05 | 383/80.92/4.1e-07 |
| dixmaang 7500 | 889/168.72/8.8e-07 | 1154/220.67/5.8e-07 | 1239/250.95/8.9e-07 | 1682/327.37/9.0e-07 | 614/112.05/9.5e-07 |
| dixmaanh 4500 | 1417/179.40/9.2e-07 | 1324/169.60/9.8e-07 | 1006/137.94/7.2e-07 | 953/120.53/9.9e-07 | 704/81.78/9.8e-07 |
| dixmaani 120 | 1930/9.09/8.7e-07 | 1595/7.68/6.7e-07 | F/F/1.2e-03 | F/F/8.4e-07 | 731/3.29/4.2e-07 |
| dixmaanj 2700 | 1193/94.28/8.5e-07 | 1382/108.65/6.2e-07 | 1320/110.36/9.5e-07 | F/F/1.0e-05 | 1153/85.27/6.4e-07 |
| dixmaank 3000 | 1142/98.31/6.5e-07 | 1158/100.76/7.8e-07 | F/F/4.0e-05 | F/F/2.7e-05 | 1799/154.65/6.6e-07 |
| dixmaanl 300 | 1554/14.02/9.8e-07 | 1424/12.64/8.9e-07 | F/F/4.6e-04 | F/F/8.0e-05 | 826/7.12/7.4e-07 |
| dixon3dq 50 | 1199/1.50/8.8e-07 | 1613/2.28/6.0e-07 | F/F/5.9e-05 | 1836/2.41/5.3e-07 | 629/0.82/6.0e-07 |
| dixon3dq 88 | 1934/2.80/8.3e-07 | 1476/2.09/6.7e-07 | F/F/1.0e-02 | F/F/4.9e-04 | 1227/1.65/5.2e-07 |
| dqdrtic 60000 | 496/35.92/7.8e-07 | 426/31.92/2.8e-07 | 197/13.41/4.1e-07 | 917/67.92/7.1e-07 | 312/21.78/6.2e-07 |
| dqrtic 100 | 22/0.06/5.7e-07 | 23/0.04/6.4e-07 | 34/0.04/7.7e-07 | 28/0.03/1.8e-07 | 60/0.12/1.8e-07 |
| dqrtic 450 | 34/0.13/2.8e-07 | 47/0.19/3.4e-07 | 33/0.15/7.4e-07 | 31/0.13/5.0e-07 | 60/0.36/5.7e-07 |
| edensch 10000 | 46/4.59/9.5e-07 | 54/6.25/6.2e-07 | F/F/8.7e-06 | F/F/3.8e-06 | F/F/3.3e-06 |
| edensch 50000 | 55/24.21/1.9e-07 | 65/29.17/8.8e-07 | F/F/1.0e-04 | F/F/1.8e-05 | F/F/1.2e-04 |
| edensch 100000 | 126/93.46/9.7e-07 | F/F/4.8e-05 | F/F/2.3e-05 | 120/139.38/5.3e-07 | F/F/2.0e-04 |
| eg2 30 | F/F/2.9e-06 | F/F/3.0e-01 | 313/0.43/8.0e-07 | F/F/3.2e-03 | F/F/1.1e-05 |
| eg2 80 | F/F/2.5e-04 | F/F/5.8e-06 | F/F/4.0e-01 | F/F/2.8e-02 | F/F/1.9e-05 |
| engval1 6 | 87/0.11/1.9e-07 | 95/0.14/2.4e-08 | F/F/4.7e-01 | F/F/8.8e-01 | F/F/1.8e-01 |
| fletchcr 10000 | 145/3.81/1.3e-07 | F/F/1.1e-03 | F/F/3.1e-04 | F/F/9.5e-04 | F/F/6.9e-04 |
| fletchcr 300000 | 211/118.78/3.9e-07 | F/F/9.2e-03 | F/F/6.2e-03 | F/F/9.5e-04 | F/F/2.6e-02 |
| freuroth 20 | 1700/2.52/9.8e-07 | 476/0.66/9.2e-07 | F/F/1.5e-05 | 455/0.60/6.8e-07 | F/F/6.8e-05 |
| freuroth 36 | F/F/2.2e-06 | F/F/6.3e-06 | F/F/8.2e-06 | F/F/6.5e-05 | F/F/7.5e-05 |
| genrose 2000 | 574/2.28/2.8e-07 | 399/1.94/4.1e-07 | 395/1.77/6.1e-07 | 1259/5.68/9.6e-07 | 692/2.85/4.4e-07 |
| genrose 47000 | 270/25.44/6.7e-07 | 336/31.54/1.3e-07 | 474/42.83/7.1e-07 | 854/76.03/9.0e-07 | 571/48.69/8.7e-07 |
| gulf 3 | 2/0.00/0.0e+00 | 2/0.00/0.0e+00 | 2/0.00/0.0e+00 | 2/0.00/0.0e+00 | 2/0.00/0.0e+00 |
| helix 3 | 479/1.02/1.6e-07 | 282/0.62/4.2e-07 | 316/0.60/7.0e-07 | 731/1.56/6.7e-07 | F/F/3.5e+03 |
| himmelbg 1000 | 3/0.01/1.6e-28 | 3/0.00/1.3e-28 | 3/0.00/1.6e-28 | 3/0.00/1.2e-28 | 3/0.00/1.6e-28 |
| himmelbg 10000 | 3/0.01/5.2e-28 | 3/0.01/4.2e-28 | 3/0.01/5.0e-28 | 3/0.01/3.8e-28 | 3/0.01/5.0e-28 |
| himmelbg 100000 | 3/0.10/1.6e-27 | 3/0.11/1.3e-27 | 3/0.12/1.6e-27 | 3/0.11/1.2e-27 | 3/0.12/1.6e-27 |
| kowosb 4 | 774/1.40/7.0e-07 | 817/1.55/4.7e-07 | 1574/3.07/8.7e-07 | F/F/5.2e-04 | 239/0.43/7.5e-07 |
| liarwhd 500 | 487/1.06/1.9e-07 | 750/1.63/9.4e-07 | 1168/2.52/8.5e-07 | F/F/2.9e-03 | 268/0.49/1.2e-07 |
| liarwhd 1000 | 534/1.43/2.3e-07 | F/F/1.3e-04 | F/F/1.6e-02 | 1267/3.35/9.8e-07 | 294/0.75/4.7e-07 |
| liarwhd 10000 | F/F/5.6e-02 | F/F/5.8e+00 | F/F/3.2e+03 | F/F/1.5e+03 | 409/8.96/8.9e-07 |
| nondquar 4 | F/F/1.2e-04 | F/F/5.0e-05 | F/F/4.9e-03 | 395/0.66/2.2e-07 | 87/0.12/6.5e-07 |
| penalty1 1000 | 15/0.82/1.2e-07 | 15/0.82/1.2e-07 | 15/0.86/1.2e-07 | 15/0.87/1.2e-07 | 15/0.89/1.2e-07 |
| penalty1 10000 | 9/28.41/9.6e-07 | 9/28.32/9.6e-07 | 9/28.02/9.6e-07 | 9/28.38/9.6e-07 | 9/28.46/9.6e-07 |
| quartc 100 | 22/0.04/5.7e-07 | 23/0.04/6.4e-07 | 34/0.05/7.7e-07 | 28/0.05/1.8e-07 | 60/0.13/1.8e-07 |
| quartc 450 | 34/0.14/2.8e-07 | 47/0.20/3.4e-07 | 33/0.14/7.4e-07 | 31/0.12/5.0e-07 | 60/0.31/5.7e-07 |
表 2 数值试验报告(续)
| Problems | JLJW+ | KD | DK | HZ | SPF2 |
| Name/n | Itr/Tcpu/||g*|| | Itr/Tcpu/||g*|| | Itr/Tcpu/||g*|| | Itr/Tcpu/||g*|| | Itr/Tcpu/||g*|| |
| tridia 200 | 1491/2.44/3.2e-07 | 1380/2.41/9.8e-07 | 1699/2.90/9.3e-07 | F/F/5.9e-06 | 593/0.94/5.5e-07 |
| tridia 400 | 1905/3.90/5.7e-07 | F/F/1.1e-03 | F/F/8.8e-03 | F/F/3.8e-05 | 733/1.29/6.9e-07 |
| sinquad 3 | 406/0.57/4.7e-07 | 272/0.34/8.9e-07 | F/F/3.1e-04 | 501/0.63/3.0e-07 | 366/0.45/9.2e-07 |
| vardim 8 | 12/0.01/4.0e-08 | 12/0.01/4.0e-08 | 12/0.01/4.0e-08 | 12/0.01/4.0e-08 | 12/0.02/4.0e-08 |
| watson 3 | 107/0.26/2.6e-07 | 147/0.36/6.3e-07 | 51/0.12/2.1e-07 | 121/0.32/5.8e-07 | 108/0.31/9.8e-07 |
| woods 10000 | F/F/1.3e-02 | 792/20.82/9.5e-07 | 883/22.24/6.2e-07 | 922/22.70/8.8e-07 | 309/7.19/9.9e-07 |
| bdexp 1000 | 3/0.01/5.9e-107 | 3/0.00/7.1e-108 | 3/0.00/4.4e-107 | 3/0.00/2.5e-108 | 3/0.00/4.5e-107 |
| bdexp 10000 | 3/0.01/1.2e-109 | 3/0.01/9.4e-110 | 3/0.01/1.1e-109 | 3/0.01/8.4e-110 | 3/0.01/1.1e-109 |
| bdexp 100000 | 3/0.12/1.7e-109 | 3/0.13/1.7e-109 | 3/0.15/1.7e-109 | 3/0.15/1.7e-109 | 3/0.12/1.7e-109 |
| exdenschnf 1000 | 25/0.05/4.6e-07 | 68/0.18/2.4e-07 | 65/0.17/5.2e-07 | 91/0.35/3.8e-07 | 96/0.28/9.7e-07 |
| exdenschnf 10000 | 26/0.56/3.1e-07 | 68/2.43/7.6e-07 | 73/2.21/2.5e-07 | 85/2.85/2.6e-07 | 843/33.85/8.8e-07 |
| exdenschnf 100000 | 27/4.41/1.1e-07 | 69/15.80/6.0e-07 | 73/14.86/7.8e-07 | 59/12.45/2.2e-07 | 114/25.09/2.1e-07 |
| mccormak 2 | 21/0.05/9.3e-08 | 19/0.01/8.1e-07 | 63/0.07/9.0e-08 | 39/0.06/1.2e-07 | F/F/2.9e+04 |
| exdenschnb 1000 | 22/0.03/8.2e-08 | 27/0.05/8.0e-07 | 74/0.19/4.5e-07 | 32/0.05/3.5e-07 | 102/0.27/4.8e-07 |
| exdenschnb 10000 | 22/0.23/2.6e-07 | 28/0.40/7.1e-07 | 82/1.38/3.2e-07 | 25/0.29/1.0e-06 | 153/2.80/8.0e-07 |
| exdenschnb 100000 | 22/1.58/8.2e-07 | 30/2.59/2.6e-07 | 88/9.13/2.7e-07 | 29/2.19/4.5e-07 | 91/9.42/1.5e-07 |
| genquartic 5000 | 24/0.20/4.7e-07 | 31/0.32/9.0e-08 | 108/1.30/2.6e-07 | 33/0.22/8.6e-07 | 115/1.37/2.6e-07 |
| genquartic 30000 | 35/1.33/1.9e-07 | 38/1.37/2.0e-07 | 96/4.61/5.6e-07 | 36/1.43/7.0e-08 | 157/8.53/2.4e-07 |
| genquartic 100000 | 27/2.41/7.1e-08 | 37/3.79/5.2e-07 | 98/13.02/3.0e-07 | 81/11.20/8.8e-07 | 182/26.69/4.3e-07 |
| biggsb1 100 | 1240/1.82/6.9e-07 | 1381/1.97/9.8e-07 | F/F/2.9e-05 | F/F/7.2e-06 | 621/0.82/9.4e-07 |
| sine 4000 | 64/1.65/7.7e-09 | 180/4.19/1.3e-08 | F/F/8.0e-02 | 91/2.17/3.0e-07 | F/F/1.1e+03 |
| sine 20000 | 94/7.82/1.7e-09 | 181/14.39/6.0e-13 | F/F/9.7e-03 | 81/7.52/9.5e-07 | F/F/7.6e-04 |
| sine 40000 | 87/13.53/2.3e-08 | 394/67.01/7.9e-07 | F/F/5.0e-01 | 80/13.64/3.2e-07 | F/F/2.1e+03 |
| fletcbv3 8 | 43/0.04/5.3e-07 | 51/0.05/4.7e-07 | 47/0.05/7.7e-07 | 30/0.03/7.4e-07 | 52/0.05/3.9e-07 |
| nonscomp 2000 | 176/0.65/1.3e-07 | F/F/3.0e-03 | 100/0.37/4.2e-07 | F/F/4.6e-03 | F/F/5.0e-05 |
| nonscomp 10000 | 275/6.17/6.5e-07 | F/F/6.2e-02 | F/F/3.8e-02 | 413/9.78/4.7e-07 | F/F/1.2e-04 |
| power1 55 | 1699/2.30/9.5e-07 | F/F/5.1e-06 | F/F/1.4e-04 | F/F/3.6e-04 | 737/0.84/9.5e-07 |
| raydan1 2000 | 857/2.94/6.9e-07 | 1118/3.86/6.5e-07 | F/F/1.4e-04 | 1335/4.78/7.8e-07 | F/F/9.2e-05 |
| raydan1 3000 | 1252/8.69/7.5e-07 | F/F/2.5e-04 | F/F/2.6e-04 | F/F/3.8e-04 | F/F/2.3e-04 |
| raydan2 500 | 15/0.02/2.2e-07 | 18/0.02/1.2e-08 | 24/0.04/2.6e-08 | 21/0.03/8.5e-08 | 14/0.02/6.6e-08 |
| raydan2 5000 | 18/0.21/1.6e-07 | 21/0.28/7.2e-08 | 46/0.71/6.6e-07 | 38/0.56/2.7e-07 | 12/0.10/3.6e-07 |
| raydan2 50000 | 18/1.44/8.9e-07 | 19/1.65/5.7e-07 | 21/1.89/9.8e-07 | 22/1.90/9.3e-07 | 48/5.15/5.0e-07 |
| diagonal1 60 | 164/0.23/7.3e-07 | 88/0.09/9.4e-07 | 84/0.08/8.2e-07 | F/F/2.4e-06 | 179/0.28/8.7e-07 |
| diagonal1 100 | 242/0.34/1.7e-07 | F/F/2.6e-05 | F/F/3.3e-06 | 348/0.57/9.7e-07 | F/F/5.5e-06 |
| diagonal2 2000 | 1118/6.78/7.2e-07 | 1049/6.59/9.3e-07 | 334/1.97/6.9e-07 | 1988/12.48/7.6e-07 | 444/2.32/3.9e-07 |
| diagonal3 150 | F/F/2.3e-05 | 194/0.40/7.9e-07 | F/F/8.4e-06 | F/F/6.0e-06 | F/F/4.3e-05 |
| bv 2000 | 13/5.24/3.3e-07 | 14/5.79/3.1e-07 | 22/9.65/2.3e-07 | 9/3.23/4.6e-07 | 123/53.66/5.8e-07 |
| bv 20000 | 1/0.14/1.2e-08 | 1/0.00/1.2e-08 | 1/0.00/1.2e-08 | 1/0.00/1.2e-08 | 1/0.00/1.2e-08 |
| ie 100 | 15/1.33/2.8e-07 | 13/1.12/6.2e-07 | 20/1.94/5.0e-07 | 14/1.34/7.5e-07 | 38/4.96/6.6e-07 |
| ie 200 | 15/4.47/3.9e-07 | 13/3.56/7.2e-07 | 18/5.35/3.1e-07 | 17/5.68/9.3e-08 | 40/17.36/3.2e-07 |
| singx 200 | 348/2.28/7.4e-07 | 1218/7.82/6.3e-07 | F/F/3.5e-03 | F/F/7.0e-06 | 339/1.98/9.9e-07 |
| singx 1500 | 1105/318.57/6.4e-07 | 1940/559.01/9.8e-07 | F/F/6.3e-03 | F/F/1.8e-05 | 292/75.74/9.0e-07 |
| band 3 | 111/0.23/1.3e-07 | 67/0.12/6.3e-07 | 38/0.06/4.2e-07 | 77/0.11/6.9e-07 | 46/0.05/8.9e-08 |
| gauss 3 | 59/0.16/5.6e-07 | 47/0.10/6.4e-07 | 15/0.02/1.7e-07 | 14/0.03/8.1e-07 | 30/0.08/7.4e-07 |
| jensam 2 | 201/0.35/7.7e-07 | 119/0.19/6.7e-07 | 153/0.24/5.3e-07 | 211/0.39/7.0e-07 | 173/0.29/9.7e-07 |
| lin 100 | 2/0.01/2.0e-14 | 2/0.00/2.0e-14 | 2/0.00/2.0e-14 | 2/0.00/2.0e-14 | 2/0.00/2.0e-14 |
| lin 1000 | 12/83.01/1.3e-07 | 12/83.63/1.3e-07 | 12/82.60/1.3e-07 | 12/81.73/1.3e-07 | 12/82.49/1.3e-07 |
| osb2 11 | 1717/6.76/8.4e-07 | F/F/2.5e-03 | F/F/8.2e-04 | F/F/6.4e-04 | F/F/4.9e-03 |
| pen1 55 | 626/1.47/6.2e-07 | 448/1.02/9.2e-07 | 1475/3.47/9.5e-07 | 839/1.99/4.7e-07 | 106/0.18/1.5e-08 |
| pen2 100 | F/F/4.1e-05 | 274/2.25/6.2e-07 | F/F/1.1e-05 | 430/3.57/9.0e-07 | F/F/1.6e-05 |
| rosex 40 | F/F/7.3e-04 | 1077/2.00/5.3e-07 | 1496/2.58/9.4e-07 | 828/1.45/5.5e-07 | 141/0.18/7.1e-07 |
| sing 4 | 545/0.97/4.7e-07 | 380/0.60/6.7e-07 | F/F/5.0e-04 | F/F/5.5e-06 | 254/0.50/3.4e-08 |
| trid 500 | F/F/7.2e-05 | 899/55.29/1.0e-06 | F/F/1.5e-02 | 410/24.09/8.6e-07 | F/F/1.4e-04 |
| trid 1000 | 500/76.37/7.1e-07 | 211/29.37/3.9e-07 | F/F/4.5e-04 | 754/111.54/8.3e-07 | 391/55.48/9.2e-07 |
图 5
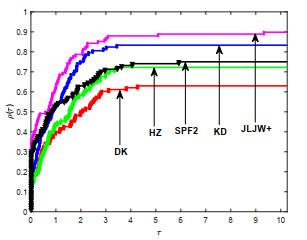
图 6
参考文献
Method of conjugate gradient for solving linear equations
DOI:10.6028/jres.049.044 [本文引用: 2]
Function minimization by conjugate gradients
DOI:10.1093/comjnl/7.2.149 [本文引用: 1]
Note surla convergence de directions conjugées
The conjugate gradient method in extreme problems
DOI:10.1016/0041-5553(69)90035-4 [本文引用: 2]
A nonlinear conjugate gradient method with a strong global convergence property
DOI:10.1137/S1052623497318992 [本文引用: 1]
Efficient generalized conjugate gradient algorithms, part 1:theory
DOI:10.1007/BF00940464 [本文引用: 1]
Global convergence properties of conjugate gradient methods for optimization
Convergence properties of algorithms for nonlinear optimization
An improved Polak-Ribiére-Polyak conjugate gradient method with an efficient restart direction
An efficient modified PRP-FR hybrid conjugate gradient method for solving unconstrained optimization problems
DOI:10.1016/j.apnum.2019.06.003 [本文引用: 1]
A modified descent Polak-Ribiŕe-Polyak conjugate gradient method with global convergence property for nonconvex functions
A spectral conjugate gradient method for solving large-scale unconstrained optimization
DOI:10.1016/j.camwa.2018.10.002 [本文引用: 1]
A modified nonlinear Polak-Ribiére-Polyak conjugate gradient method with sufficient descent property
Global convergence of some modified PRP nonlinear conjugate gradient methods
DOI:10.1007/s11590-010-0224-8 [本文引用: 3]
A three term Polak-Ribiére-Polyak conjugate gradient method close to the memoryless bfgs quasi-newton method
DOI:10.3934/jimo.2018149 [本文引用: 1]
A new conjugate gradient method based on Quasi-Newton equation for unconstrained optimization
DOI:10.1016/j.cam.2018.10.035 [本文引用: 2]
A class of globally convergent conjugate gradient methods
DOI:10.1360/03ys9027 [本文引用: 2]
Two-point step size gradient methods
DOI:10.1093/imanum/8.1.141 [本文引用: 2]
A spectral conjugate gradient method for unconstrained optimization
DOI:10.1007/s00245-001-0003-0 [本文引用: 1]
A modified self-scaling memoryless Broyden-Fletcher-Goldfard-Shanno method for unconstrained optimization
DOI:10.1007/s10957-014-0528-4 [本文引用: 2]
A nonlinear conjugate gradient algorithm with an optimal property and an improved Wolfe line search
DOI:10.1137/100813026 [本文引用: 1]
A new conjugate gradient method with guaranteed descent and an efficient line search
DOI:10.1137/030601880 [本文引用: 1]
CUTEr and SifDec: A constrained and unconstrained testing environment, revisited
DOI:10.1145/962437.962439 [本文引用: 1]
Testing unconstrained optimization software
DOI:10.1145/355934.355936 [本文引用: 1]
An unconstrained optimization test functions collection
Benchmarking optimization software with performance profiles
DOI:10.1007/s101070100263 [本文引用: 1]

{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}