

1 引言
非光滑动力系统分析作为非线性动力系统的重要研究之一, 在干摩擦粘滑振动系统、可控开关电路系统、机械工程振动系统中的碰撞等方面有着广泛的应用. 非光滑动力系统不仅能在光滑动力系统中产生各种传统的分岔, 而且具有光滑动力系统所没有的一些特殊分岔, 如角碰撞分岔、滑动分岔等. 由于非光滑系统向量场的非光滑性, 传统的研究光滑系统周期解的稳定性和分岔的方法已不再适用. 因此, 需要从理论上探索非光滑系统周期解的稳定性和分岔的一些新的分析方法. 非光滑系统的复杂性使得越来越多的学者致力于此, 这也是近年来非光滑系统成为研究热点的原因之一.
分段线性微分系统的研究是从Andronov等人[1]开始的, 并受到学术界的关注. 分段连续和不连续线性微分系统在自然科学和工业中应用广泛, 比如控制理论、电路研究和非机械问题等(参见文献[2-4]). 2014年, Carvalho等人[5]研究了平面上两个区域的分段线性系统极限环的存在性. 2015年, Euzebioa等人[6]研究了被一条直线分成两部分的平面分段线性微分系统的极限环的最大个数. 2017年, Llibre等人[7]证明了不含平衡点的连续分段线性系统没有极限环, 而不含平衡点的不连续分段线性系统最多有一个极限环. 2019年, Wang等人[8]研究了鞍-焦点型平面分段线性微分系统的诱导极限环问题. 2019年, Li[9]提出了由一条垂直直线
平均法理论是作为研究非线性微分动力系统的一种经典方法, 目前得到了很好的改进和应用. 1928年, Fatou[10]首次正式提出了平均理论. Bogoliubov和Krylov[11]在1930年将平均理论付诸实践, 做出了理论贡献. 1960年, Hale[12]提出了一种范德波尔平均法来求微分方程线性系统的周期和近周期解. Halanay[13]在1966年改进了平均理论, 求解了一类二阶微分不等式和具有超前和滞后参数的系统解. 1985年, Sethna等人[14]对与平均法有关的一些重要结果进行了统一处理和推广. 1996年, Lehman等人[15]将电力电子系统的平均理论扩展到新的基于积分方程描述的包含反馈控制变换器的平均理论, 为回答平均近似的基本问题提供了理论基础. 2002年, Llibre[16]利用平均理论对二次多项式微分系统的平面极限环和全局形状进行了研究. 2014年, Llibre[17]利用高阶平均理论研究了高阶系统的周期解. 2018年, Llibre[18]用连续和不连续微分系统平均理论的新成果, 研究了两种不同形式的Michelson微分方程的周期解.
若要更好地理解一个系统的性质, 则研究它的周期解和极限环是有必要的. 对二维连续和不连续分段线性微分系统的周期解的研究已经有很多了, 但对于被一个平面分成两部分的三维系统的周期解及其定性研究却很少. 本文研究的系统采用了Llibre在文献[18]中的变换的Michelson微分系统, 并将系统的一个扰动项变成三个扰动项, 进而研究该微分系统的周期解问题.
2 主要结论
本文利用非光滑动力系统的平均法研究连续和不连续分段线性微分系统的周期解.
首先引入Michelson微分系统
其中
2016年, Llibre[18]对系统(2.1)做变量替换:
本文中, 在系统(2.2)的基础上, 将原系统的一个扰动项变为三个, 得到系统(2.3), 本文主要目的是用平均理论研究系统(2.3) 的周期解问题.
其中
首先考虑系统(2.3)
计算得到通解为
其中
下面主要研究连续扰动分段线性微分系统(2.3) 的周期解问题.
关于系统(2.3)的周期解的结论如下.
定理 2.1 对所有
此外, 这个周期解是线性稳定的.
关于周期解的稳定性, Verhulst在文献[23]中提到: 若一个周期解是渐近稳定的, 且与此解相关的庞加莱映射不动点上的所有特征值都有负实部, 那么这个周期解是局部渐近稳定的; 若其中一个特征值的实部为正, 则周期解是不稳定的; 若所有特征值的实部为零, 那么我们说周期解是线性稳定的; 而当我们考虑了非线性项时, 线性稳定性则不提供任何关于周期解的稳定性信息.
定理2.1在第4节中得到了证明. 它的证明使用了光滑微分系统的经典平均理论到连续微分系统的推广(参见文献[24]).
进一步, 考虑不连续分段线性微分系统
关于不连续分段线性微分系统(2.4)的周期解的主要结果如下.
定理 2.2 对所有
其中
而
定理2.2在第5节中得到了证明.
3 平均法理论的介绍
3.1 连续分段线性微分系统
由Llibre在2018年的结果[17, 定理3], 我们得到与下一个系统相适应的定理.
定理 3.1[18] 考虑系统
这里
的基本解矩阵,
若
且
3.2 不连续分段线性微分系统
令
这里
流形
考虑与系统(3.4)相关的微分系统
这里特征函数
系统(3.4)和(3.5)在
定理 3.2[18] 考虑微分系统
这里
定义平均函数
这里
我们有以下假设.
(1) 存在一个开有界子集
(2) 对
于是对充分小的
4 证明定理2.1
对系统(2.3)进行柱坐标变换
令
则系统(4.2)的未扰动系统为
对每个点
对所有
由于函数
是
这里
是由系统(4.3)得到的变分微分系统在解
其中
为了计算这两积分, 我们需要研究函数
情况1 当
当
情况2 当
当
情况3 当
(i)
(ii)
针对情况1, 平均函数为
计算得平均函数有唯一零点
针对情况2, 平均函数为
计算得平均函数有唯一零点
针对情况3, 平均函数为
其中
进一步计算得到
为了计算
计算
由定理3.1, 有对任意
现在, 我们必须确定系统(2.3)的周期解. 回到系统(4.1), 将自变量换回
最后, 回到系统(2.3), 我们得到周期解
定理2.1证毕.
5 证明定理2.2
对系统(2.4)进行柱坐标变换
令
则系统(5.1)的未扰动系统为
对每个点
对所有
由于函数
是
这里
是由系统(5.3)得到的变分微分系统在解
因此
其中
针对定理2.1中出现的三种情况, 分别计算不连续系统的平均函数.
情况1中的平均函数为
且有唯一零点
情况2中的平均函数为
且有唯一零点
情况3的平均函数为
其中
进一步计算得到
为了计算
解得
由于
经计算, 我们得到
将函数
图 1
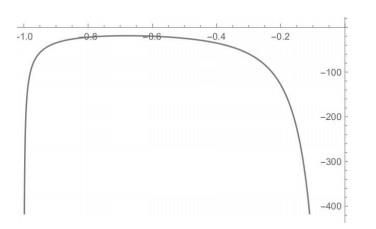
通过数学软件计算, 当
现在, 我们必须确定系统(2.4)的周期解, 它对应于已找到的周期解. 回到系统(5.1), 将自变量换回
最后, 回到系统(2.4), 我们得到周期解
定理2.2证毕.
6 总结
非光滑动力系统作为非线性动力系统的一部分, 存在于许多应用科学和工程领域中.由于众多工程模型都不能很好的用光滑系统表示, 非光滑系统的研究显得更为重要. 当今越来越多的学者将研究重心放在了分段线性微分系统的分析, 包括周期解问题、极限环个数问题及分岔与混沌问题.本文则主要研究了连续和不连续分段线性系统的周期解问题, 并通过平均法理论计算平均函数, 从而证明周期解的存在性并计算出周期解的近似表达式.
参考文献
Piece-wise smooth dynamical systems: theory and applications
Bifurcations in piece-wise smooth continuous systems
Dynamics and bifurcations of nonsmooth systems: A survey
More than three limit cycles in discontinuous piece-wise linear differential systems with two zones in the plane
DOI:10.1142/S0218127414500564 [本文引用: 1]
On the number of limit cycles in discontinuous piece-wise linear differential systems with two pieces separated by a straight line
Piece-wise linear differential systems without equilibria produce limit cycles
DOI:10.1007/s11071-016-3236-9 [本文引用: 1]
Discontinuity-induced limit cycles in a general planar piece-wise linear system of saddle-focus type
DOI:10.1016/j.nahs.2019.03.004 [本文引用: 1]
On the limit cycles of planar discontinue piece-wise linear differential systems with a unique equilibrium
Sur le mouvement d'un systeme soumis a des forces a courte periode
Application of methods of nonlinear mechanics in the theory of stationary oscillations
On the method of averaging for differential equations with retarded argument
On the method of averaging, integral manifolds and systems with symmetry
Extensions of averaging theory for power electronic systems
DOI:10.1109/63.506119 [本文引用: 1]
Averaging theory and limit cycles for quadratic systems
Higher order averaging theory for finding periodic solutions via Brouwer degree
On the periodic solutions of the Michelson continuous and discontinuous piece-wise linear differential system
DOI:10.1007/s40314-016-0413-x [本文引用: 5]
Steady solutions for the Kuramoto-Sivashinsky equation
The existence of Shilnikov homoclinic orbits in the Michelson system: A computer assisted proof
DOI:10.1007/s10208-005-0201-2 [本文引用: 1]
The Michelson system is neither global analytic, nor Darboux integrable
DOI:10.1016/j.physd.2010.01.007 [本文引用: 1]
Zero-Hopf bifurcation in the generalized Michelson system
Periodic solutions of nonlinear periodic differential systems with a small parameter
DOI:10.3934/cpaa.2007.6.103 [本文引用: 1]

{kind=link}
{kind=link}