


引言
图像引导的手术机器人可以利用医学图像来辅助完成手术,例如根据图像及医师的判断来精确定位,从而穿刺到医学生理结构的特定部位.图像引导的手术机器人辅助操作可以增强医师的精确定位能力,但手术机器人必须与成像环境兼容[4].MRI扫描仪通常具有很强的磁场、脉冲梯度和射频场.在MRI系统内,由于频繁的梯度切换产生的电磁感应可能导致导电材料产生发热现象. 在MRI扫描仪附近使用电场可能产生干扰,引起信号失真和图像失真. 因此,机器人中常用的许多组件,尤其是基于磁性功能的电磁马达等组件,不能靠近MRI扫描仪.用于协同工作且可靠近MRI扫描仪的设备及手术机器人通常称为磁共振兼容手术机器人[5,6].尽管一些研究团队已经开发出了与MRI系统兼容的机器人原型,但目前还没有用于穿刺手术的商业化磁共振兼容手术机器人系统,因此研究工作仍在全球多方机构持续进行.Tsekos和Gassert等[7,8]在其综述文章中详细介绍了磁共振兼容手术机器人系统及其遇到的相关挑战.
目前,磁共振兼容手术机器人两种典型的临床应用研究主要分为针穿刺手术及康复应用[9].Moreira等[10]开发了一种实验用MRI环境下的九自由度磁共振兼容手术机器人,主要应用于前列腺活检过程中图像引导及活检针穿刺. 该机器人系统由一个压电电机驱动的五自由度并联机器人来定位引导针,以及一个四自由度的针驱动器来完成穿刺、旋转和弹射活检枪. Stoianovici等[11]提出了一种直肠内前列腺活检穿刺机器人系统,用于在活检过程中定位引导活检针,在体外和动物实验中都取得很好的结果.Stoianovici等[12]随后完成了磁共振兼容手术机器人用于前列腺活检的临床应用研究. 在康复应用方面,Estévez等[13]采用一台磁共振兼容的手臂机器人研究了进行主动和被动肘关节运动的健康受试者的大脑活动网络,并测试活动情况随时间的重现性.Yap等[14]提出了一种用于手部康复的可穿戴软体机器人手套的设计、制作和评估方案,该手套由一组由硅弹性体制成的软气动执行器组成,用于手部康复期间的大脑活动研究.
以上团队主要通过完成ASTM F2503测试验证手术机器人系统的磁共振兼容性[15].此外,根据ASTM标准,通过ASTM F2052和ASTM F2213可完成机器人的静态磁场感应位移力及扭矩测试;通过ASTM F2182可完成机器人射频场诱导加热测试、梯度磁场诱导加热和振动测试,以及梯度磁场和射频场诱导电压测试,并探索完成由静态磁场、梯度磁场或射频场导致的设备故障相关的测试. 但是,以上测试是ASTM针对于医疗设备而非医疗手术机器人系统的磁共振兼容性测试. 虽然手术机器人系统的机械手本身因选定合适的本体材料可以不受电磁干扰,但其他组件通过电力作用仍可能造成电磁干扰,可能无法达到磁共振兼容的设计要求.
为进一步验证手术机器人系统的磁共振兼容性,本研究提出了基于磁共振图像质量评价的机器人系统磁共振兼容性分析方法,采用磁共振图像信噪比(SNR)、图像变化因数(ICF)、图像畸变量等参数,建立图像质量评价依据,逐一分析机器人系统组件通电及其运动对图像质量产生的影响,从而为医疗手术机器人系统的磁共振兼容性分析提供可靠的测试方法与理论依据.
1 图像质量评价模型
1.1 图像数据集
本研究将通过MRI扫描仪获取的图像数据集扩分为4类,分别包括:{N}组(仅测试模体置于MRI扫描仪内,无手术机器人)、{P}组(测试模体、手术机器人均置于MRI扫描仪内)、{A}组(测试模体、手术机器人均置于MRI扫描仪内,且手术机器人系统呈通电状态)、{M}组(测试模体、手术机器人均置于MRI扫描仪内,且手术机器人通电后并产生机构运动),具体描述见表1. 以上4类测试配置中,{N}组执行3次噪声测试,得到{N1}、{N2}、{N3} 3组图像数据集;{A}组、{P}组、{M}组分别执行2次噪声测试,得到{A1}、{A2}、{P1}、{P2}、{M1}、{M2} 6组图像数据集;共计获得9组图像数据集. 基准测试即{N}组用来确定MRI环境中的正常噪声水平. 其他3组用于确定机器人本体{P}、机器人系统组件通电{A},以及机器人系统运动{M}相对于无机器人情况{N}所引起的附加噪声.
表1 磁共振图像数据集的分类及描述
Table 1
| 图像 数据集 | 测试配置 | 配置描述 | |
|---|---|---|---|
| 测试模体 | 手术机器人 | ||
| {N}组 | √ | × | 测试模体与线圈配置完成,单独放置于MRI扫描仪设定位置处. |
| {P}组 | √ | √ | {N}组配置完成后,手术机器人与测试模体配置好手术体位. 控制器配置完成,置于MRI扫描仪内. 系统未通电. |
| {A}组 | √ | √ | {P}组配置完成后,手术机器人系统组件通电,等待指令. |
| {M}组 | √ | √ | {A}组配置完成后,手术机器人系统收到控制指令,稳定驱动机构运动. |
√表示存在,×表示不存在. 图像采集顺序依次为{P}、{A}、{M}、{N}. 最后采集{N}组图像,是因为在不改变模体和线圈位置的情况下,将手术机器人移开比将其放在MRI系统内更为方便.
9组图像数据集中的图像噪声在频谱用图形化表示,并建立机器人本体{P}相对于无机器人{N}、机器人系统组件通电{A}相对于机器人本体{P}、机器人系统运动{M}相对于机器人系统组件通电{A}情况而产生的图像退化量,包括SNR、ICF及图像畸变量分析.
1.2 SNR模型
其中,u和v分别为图像ROI范围内任意一像素点的横纵坐标值.
一对数据集{I, J}中,信号强度S可更新为计算两组数据集ROI范围内的平均像素强度值,噪声N计算方式为两组图像数据集ROI范围内逐像素差分图像的像素强度标准差. 则:
两组图像数据集的SNR表示为:
在每两组图像数据集内,1到n所有图像中的某一切片

(5)式表示每一图像切片在ROI范围内的SNR相对变化值
以此类推,
1.3 ICF模型
SNR模型未考虑机器人系统组件通电及其运动所可能导致的图像畸变. 而ICF测试可以量化{P-N}、{A-P}、{M-A}数据集间的区别. ICF测试选用{N}组中3组图像,{P}组、{A}组、{M}组中各1组图像,且ROI选定为SNR测试中的相同区域. 一对数据集{I, J}中,{I}为测试图像,{J}为参考图像,变化C是取ROI内两组图像数据集中像素强度间逐像素差值绝对值的平均值:
P表示在参考图像数据集{J}中整个ROI范围内像素强度的平均值:
因此,每一图像切片s在ROI范围内的变化因数ICF可表示为:
因此,
(10)式表示每一图像切片在ROI范围内的ICF相对变化量即
以此类推,
2 实验部分
2.1 磁共振兼容模体
图像质量评价模型中所提到的测试模体,是自主设计的与MRI系统兼容的低成本、易制作的模体,如图1所示. 采用树脂材料和Formlabs 3D打印机制作完成,模型整体尺寸为70 mm×70 mm×75 mm,模型内底部设计有高20 mm、厚1 mm的7×7组网格,模型侧面设计有4组棒状标记物安装槽,槽体从模型底部到顶部呈45˚斜向设置. 置于MRI扫描仪前,将水或者凝胶(如琼脂、明胶)等磁共振显像材料填充到模体空间(本文填充的是琼脂),经冷藏备用. 标记物安装在模型四周并由黑色卡具固定,标记物由钆稀释液填充,稀释比例为1/200.
图1
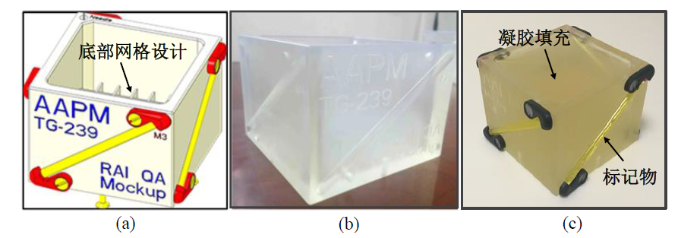
图1
(a)磁共振兼容模体3D模型图;(b)模体原型图;(c)填充凝胶的实体图
Fig. 1
(a) 3D model of the magnetic resonance compatible mockup; (b) 3D prototype of the mockup; (c) The physical mockup filled with gel
2.2 模体、机器人、线圈配置
模体应放置于MRI扫描仪稳定的平面上,并沿其主轴对齐,以便对齐成像系统及机器人坐标系完成图像配准. 选用体阵列线圈应用于模体成像实验. 线圈应放置在模体和机器人周围,并确保在所有测试状态下线圈相对于模体的位置保持固定,以避免混淆不同扫描时图像信号变化源. 线圈采用刚性支撑结构,确保机器人机器运动不受干扰,同时保证定位的一致性,并且在不移动线圈的情况下可以实现机器人系统的放置与移除. 首先对机器人与测试模体共同扫描,获取{P}组、{A}组、{M}组图像数据集;再移除机器人进行模体成像,获取{N}组图像数据集. 模体、机器人及线圈配置如图2(a)所示.
图2
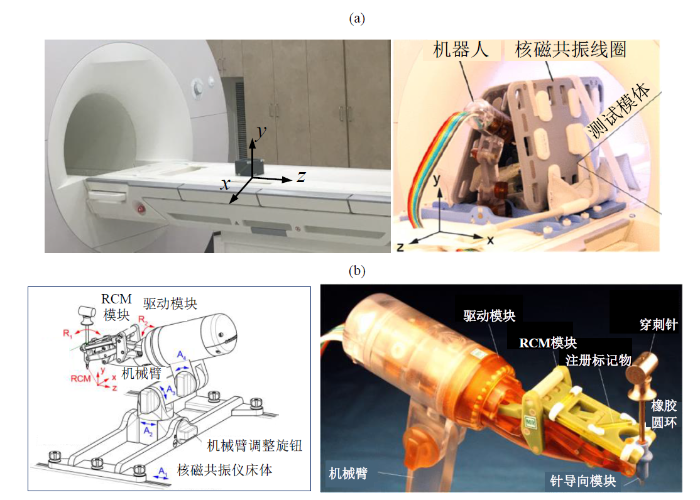
图2
(a)测试模体、手术机器人、线圈配置方案;(b)机器人3D模型及原型图
Fig. 2
(a) The configuration of physical mockup, surgical robot and coil; (b) 3D model and prototype of the robotic system
本研究采用的磁共振图像导向机器人为团队自主研发的气动步进电机驱动方式,原型如图2(b)所示. 机器人、气动步进电机及编码器均由不具导电性的非金属非磁性材料构成.机器人主要由机械臂、驱动模块、远程运动中心(RCM)模块组成. 该机器人支撑臂的定位由4自由度实现,包括沿核磁共振扫描仪轨道滑动(A1)及三个方向的转动(A2、A3、A4).RCM模块由2自由度实现,包括上下方向的俯仰(R1)及左右方向的摆动(R2).机器人末端执行部分为穿刺针,外围套有橡胶圆环,穿刺针经针导向模块可实现经皮穿刺.
2.3 MRI协议
测试模体及手术机器人的MRI协议选用美国放射学会(ACR)MRI质量控制中心的标准2D自旋回波(SE)T1加权(T1w)和T2加权(T2w)序列,以及一项附加的3D梯度回波(GRE)序列,并开启2D失真校正及预扫描规范两项扫描选项,MRI协议如表2所示.3种序列图像切片数均设定为30,层间距设定为2.5 mm,切片厚度为0,像素矩阵为256×256,成像野边长25.6 cm.
表2 测试模体与机器人系统选用的MRI协议
Table 2
| 扫描参数名称 | ACR 2D T1w SE | ACR 2D T2w SE | 3D T1w GRE |
|---|---|---|---|
| 翻转角 | 90˚ | 90˚ | 10˚ |
| 重复时间/ms | 500 | 2000 | 8.5 |
| 回波时间/ms | 20 | 80 | 3.82 |
| 信号平均数 | 1 | 1 | 2 |
| 接收带宽/kHz | 16.6 | 16.6 | 66.6 |
| 扫描时间/(min:s) | 3:43 | 11:24 | 2:12 |
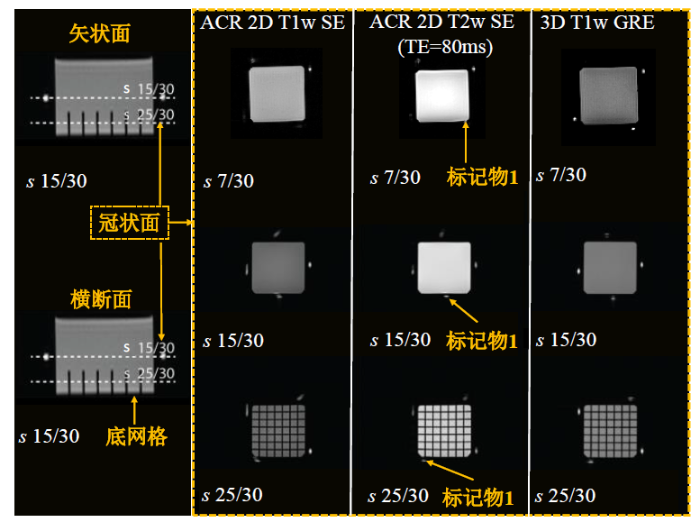
在无机器人和机器人不同操作状态下,采用3种序列,分别获取{N}组的3组图像,{P}、{A}、{M}组各2组图像,用于进行SNR、ICF测试. 分别完成冠状面、矢状面、横断面的平面扫描后,指定表中序列获取的平面成像切片集,用作图像质量分析,平面成像切片集应覆盖整个测试模体. 由于模体放置于MRI扫描仪平面,并沿主轴对齐,故选取冠状面图像作分析. 图3后三列所示为上述3种序列中获取的N1组磁共振图像中第7、15及25切片的冠状面图像,第一列所示为第15切片的矢状面及横断面图像. 为对齐成像系统及机器人系统坐标系,应使用四个基准标记物进行配准,图3中标示出标记物1由初始切片到末端切片的显像位置变化.
图3
2.4 磁共振图像畸变量分析
对于磁共振图像畸变量的计算,部分研究团队采用的方法为首先通过细化网格相交线,将其表征为图像骨架,进而计算骨架的交叉点. 数字化模式细化网格法可能导致细化的骨架上丢失必要的像素,从而导致计算骨架的交点时出现问题. 因此,本研究提出一种像素区域搜索方法,以保证图像的每个网格线交叉点均能计算得到. 磁共振兼容模体的物理模型注册到图像空间坐标系的重建模型后,将物理模型的交叉网格线
图4
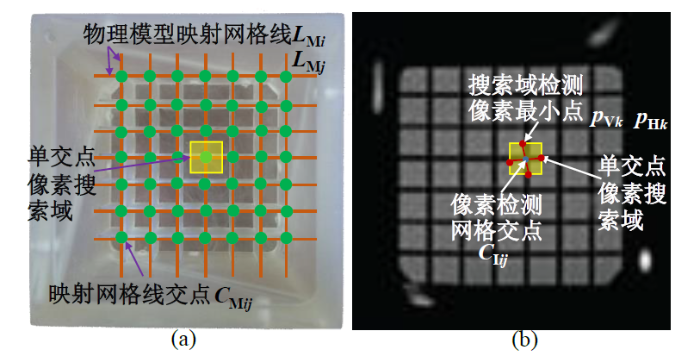
图4
(a)模型网格线示意图;(b)图像网格线交叉点检测算法示意图
Fig. 4
(a) The schematic diagram of the model grid line; (b) The detection algorithm of the image grid line intersection
3 结果与讨论
3.1 SNR测试
以ACR 2D T1w SE为获取方式,分别计算{N1, N3}、{N2, N3}、{A1, A2}、{M1, M2}四对数据集ROI范围内图像信号强度、逐像素差分图像的像素强度标准差和SNR. 如图5(a)图像信号强度所示,第7切片至21切片为实验模体的均匀信号区,{N}组图像信号强度在534~607间均匀变化,22切片始进入底部网格区(如图3所示),图像信号强度骤降为在450~491间均匀变化,可见模体底部网格的设置使图像像素强度减小. 机器人系统组件通电及其运动造成{A}组及{M}组图像信号强度较{N}组降低,7~21切片图像信号强度在490~575范围内均匀变化,并在网格出现后骤降为422~478范围内均匀变化. 如图5(b)所示,{A}组及{M}组数据逐像素差分图像的像素强度标准差值较{N}组增大,其中{A}组数据增大更为明显. 如图5(c)图像信噪比所示,{A}组及{M}组数据信噪比值较{N}组减小,其中{A}组数据减小更为明显.
图5
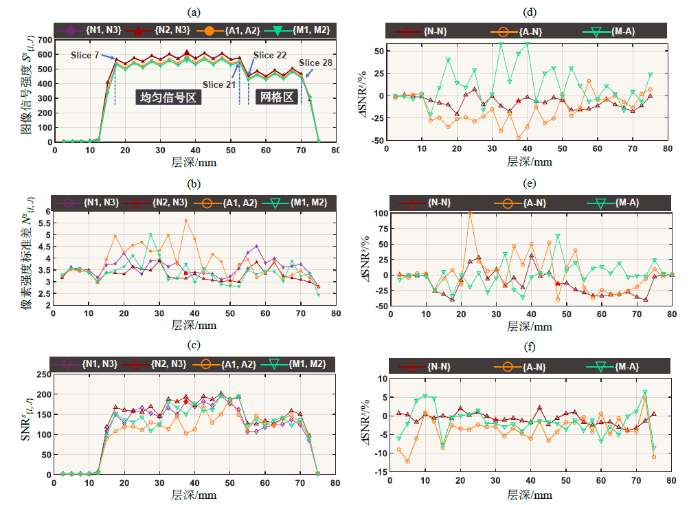
图5
(a)~(c) ACR 2D T1w SE序列图像信号强度、像素强度标准差及SNR随图像层深的变化;(d)~(f) ACR 2D T1w SE、ACR 2D T2w SE、3D T1w GRE序列图像SNR的相对变化量随图像层深的变化
Fig. 5
(a)~(c) Variation of the image signal strength, standard deviation of pixel strength, and SNR with the imaging depth when using ACR 2D T1w SE sequence; (d)~(f) The SNR relative changes with the imaging depth when using ACR 2D T1w SE, ACR T2w SE, and 3D T1w GRE sequences, respectively
分别以ACR 2D T1w SE、ACR 2D T2w SE、3D T1w GRE三种数据集获取方式,对{N-N}、{A-N}、{M-A}进行SNR相对变化量分析,结果如图5(d)~(f)所示. 采用ACR 2D T1w SE数据集获取方式时, {M-A}组的SNR相对变化量高于{A-N}、{N-N}组,{M-A}组所有切片下
3.2 ICF测试
以ACR 2D T1w SE为数据获取方式,图6(a)展示{N1}、{N2}、{N3}、{A1}、{M1}五组图像ROI范围内的像素强度随图像层深的变化. 同样地,由于P组图像数据集已省略,以ACR 2D T1w SE为获取方式对{N1, N3}、{N2, N3}、{A1, N3}、{M1, A1}四对数据集分别取图像逐像素差值以及图像变化因数ICF. 由图6(a)可知,{A1}和{M1}组图像较{N}组图像像素强度有所降低,且{M1}组图像像素强度降低幅度略大于{A1}组,说明机器人系统运动相较于机器人系统组件通电对图像质量的影响更大. 如图6(b)图像逐像素差值所示, {A1, N3}、{M1, A1}两对图像数据集的逐像素差值明显高于{N1, N3}、{N2, N3},且{A1, N3}相对于{M1, A1}的逐像素差值在均匀信号区更大,在网格区更小. 如图6(c)图像变化因数ICFs{I, J}所示,N组图像{N1, N3}、{N2, N3}的ICF极为微小,因此在计算组间ICF相对变化量
图6
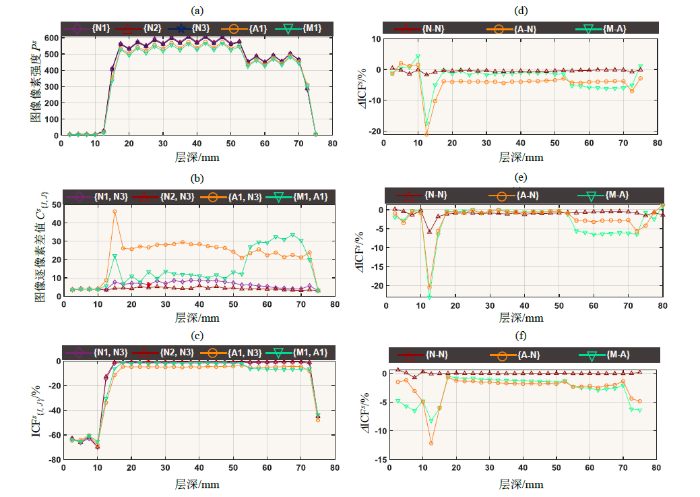
图6
(a)~(c) ACR 2D T1w SE序列图像像素强度、图像逐像素差值及ICF随图像层深的变化;(d)~(f) ACR 2D T1w SE、ACR 2D T2w SE、3D T1w GRE序列图像ICF的相对变化量随图像层深的变化
Fig. 6
(a)~(c) Variation of the image pixel strength, pixel difference and ICF with the imaging depth when using ACR 2D T1w SE sequence; (d)~(f) The ICF relative changes with the imaging depth when using ACR 2D T1w SE, ACR 2D T2w SE, and 3D T1w GRE sequences
分别采用ACR 2D T1w SE、ACR 2D T2w SE、3D T1w GRE三种数据集获取方式,对{N-N}、{A-N}、{M-A}进行ICF相对变化量分析,结果如图6(d)~(f)所示. 三种方式得到的{M-A}组间
3.3 磁共振图像畸变量测试
根据图像畸变量计算方法,将配准到图像空间坐标系的物理模型网格线
图7
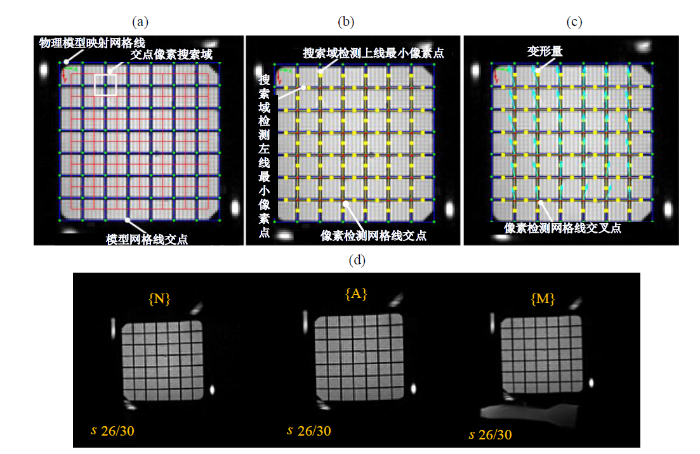
图7
磁共振图像畸变量分析. (a)映射网格及像素搜索域;(b)像素检测网格线交点;(c)模型及像素检测网格线交点误差;(d) {N}、{A}、{M}组图像的第26切片
Fig. 7
The analysis of the MR image distortion. (a) Mapping grid and the pixel searching area; (b) Detected intersection of the pixel grid lines; (c) Errors between the intersection points of the image grid and the mockup grid; (d) The 26th slice of image sets {N}, {A} and {M}
3.4 讨论
图8所示为SNR及ICF在组间的相对变化量. 3D T1w GRE序列的
图8
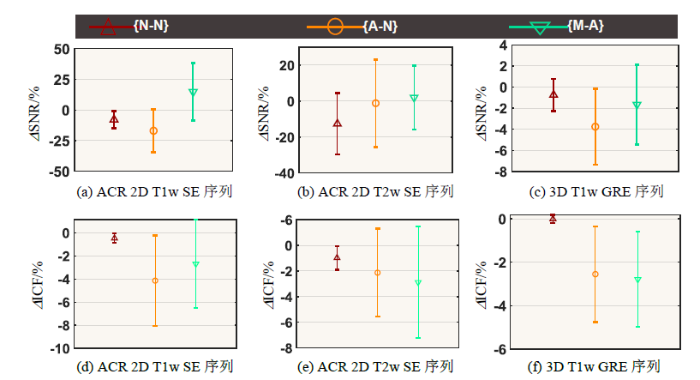
图8
组间SNR、ICF的相对变化量均值及标准差
Fig. 8
The average and standard deviation of the SNR and ICF relative changes among image sets
此外,在进行SNR及ICF测试分析时,ACR 2D T1w (T2w) SE序列的图像
4 结论与展望
在研究人员针对单一医疗设备而非医疗设备系统进行磁共振兼容性测试研究的基础上,为进一步验证医疗手术机器人系统组件的磁共振兼容性情况,本研究提出了基于磁共振图像质量评价的机器人系统组件磁共振兼容性分析方法,结合图像SNR、ICF及图像畸变量,建立图像质量评价模型,逐一分析机器人系统组件通电、机器人系统运动对图像质量产生的影响,形成图像质量评价依据. 所提出的分析方法具有以下特点:
(1)由于单一图像SNR测试不能考虑机器人本体、系统组件通电及其运动所可能导致的图像伪影,因此本研究引入了ICF测试,可以量化{P-N}、{A-P}、{M-A}组间图像数据集的区别. 同时还分析了图像畸变量,增强了图像质量评价依据.
(2)根据组间图像数据集的逐一区别及图像畸变量,可充分分析手术机器人系统组件通电及其运动时的磁共振兼容性,为手术安全及操作精度带来更高保障.
此外,本研究提出的图像质量评价方法,预期可为实验室研究用的新型医疗手术机器人及其系统组件的磁共振兼容性分析提供可靠的测试方法与理论依据.
利益冲突
无
参考文献
Advances in magnetic resonance imaging guided radiation therapy
[J].
核磁共振图像引导的放疗技术进展
[J].
A novel method for magnetic resonance ocular imaging using super-resolution reconstruction
[J].
一种以超分辨率理论为基础的磁共振眼球成像方法
[J].
Application progress of puncture robot in minimally invasive surgery
[J].
穿刺机器人在微创外科手术中的应用进展
[J].
Analysis and research of double tendon-sheath transmission under nuclear magnetic environment
[J].
应用于核磁环境的双腱鞘传动分析与研究
[J].
Development and evaluation of an actuated MRI-compatible robotic system for MRI-guided prostate intervention
[J].DOI:10.1109/TMECH.2011.2163523 URL [本文引用: 1]
Design and experiment of MRI-guided needle insertion surgical robot
[J].
MRI向导的手术针介入系统设计与兼容性研究
[J].
Magnetic resonance-compatible robotic and mechatronics systems for image-guided interventions and rehabilitation: a review study
[J].DOI:10.1146/annurev.bioeng.9.121806.160642 URL [本文引用: 1]
MRI/fMRI-compatible robotic system with force feedback for interaction with human motion
[J].DOI:10.1109/TMECH.2006.871897 URL [本文引用: 1]
Design of MRI-compatible robot system for breast invasive surgery
[J].
MRI兼容的乳腺穿刺介入辅助机器人设计与路径规划研究
[J].
The MIRIAM robot: a novel robotic system for MR-guided needle insertion in the prostate
[J].
MRI-Safe robot for endorectal prostate biopsy
[J].DOI:10.1109/TMECH.2013.2279775 URL [本文引用: 1]
MR safe robot, FDA clearance, safety and feasibility of prostate biopsy clinical trial
[J].DOI:10.1109/TMECH.2016.2618362 URL [本文引用: 1]
A reliability study on brain activation during active and passive arm movements supported by an MRI-compatible robot
[J].
DOI:10.1007/s10548-014-0355-9
PMID:24718725
[本文引用: 1]

In neurorehabilitation, longitudinal assessment of arm movement related brain function in patients with motor disability is challenging due to variability in task performance. MRI-compatible robots monitor and control task performance, yielding more reliable evaluation of brain function over time. The main goals of the present study were first to define the brain network activated while performing active and passive elbow movements with an MRI-compatible arm robot (MaRIA) in healthy subjects, and second to test the reproducibility of this activation over time. For the fMRI analysis two models were compared. In model 1 movement onset and duration were included, whereas in model 2 force and range of motion were added to the analysis. Reliability of brain activation was tested with several statistical approaches applied on individual and group activation maps and on summary statistics. The activated network included mainly the primary motor cortex, primary and secondary somatosensory cortex, superior and inferior parietal cortex, medial and lateral premotor regions, and subcortical structures. Reliability analyses revealed robust activation for active movements with both fMRI models and all the statistical methods used. Imposed passive movements also elicited mainly robust brain activation for individual and group activation maps, and reliability was improved by including additional force and range of motion using model 2. These findings demonstrate that the use of robotic devices, such as MaRIA, can be useful to reliably assess arm movement related brain activation in longitudinal studies and may contribute in studies evaluating therapies and brain plasticity following injury in the nervous system.
A magnetic resonance compatible soft wearable robotic glove for hand rehabilitation and brain imaging
[J].
DOI:10.1109/TNSRE.2016.2602941
PMID:28113591
[本文引用: 1]
In this paper, we present the design, fabrication and evaluation of a soft wearable robotic glove, which can be used with functional Magnetic Resonance imaging (fMRI) during the hand rehabilitation and task specific training. The soft wearable robotic glove, called MR-Glove, consists of two major components: a) a set of soft pneumatic actuators and b) a glove. The soft pneumatic actuators, which are made of silicone elastomers, generate bending motion and actuate finger joints upon pressurization. The device is MR-compatible as it contains no ferromagnetic materials and operates pneumatically. Our results show that the device did not cause artifacts to fMRI images during hand rehabilitation and task-specific exercises. This study demonstrated the possibility of using fMRI and MR-compatible soft wearable robotic device to study brain activities and motor performances during hand rehabilitation, and to unravel the functional effects of rehabilitation robotics on brain stimulation.
Standard practice for marking medical devices and other items for safety in the magnetic resonance environment
[R].
Multi-imager compatible actuation principles in surgical robotics
[J].
‘MRI Stealth’ robot for prostate interventions
[J].DOI:10.1080/13645700701520735 URL [本文引用: 1]
Multi-imager compatible, MR safe, remote center of motion needle-guide robot
[J].DOI:10.1109/TBME.2017.2697766 URL [本文引用: 2]
Design and implementation of a monitoring system for measuring polarization degree of optical pumping 3He
[J].
光泵抽运3He极化程度监控系统的设计与实现
[J].
Improving signal-to-noise ratio in magnetic resonance imaging using dynamic receiver gain
[J].
利用动态接收增益提高磁共振成像信噪比的方法
[J].
Determination of signal-to-noise ratio (SNR) in diagnostic magnetic resonance imaging
[R].

{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}