

1 引言
振动性理论是微分方程定性理论中的一个重要的分支, 它起源于研究热传导方程时提出的二阶齐次线性常微分方程的振动问题. 振动性理论在物理学, 疾病动力学, 生物学等众多领域都有广泛的应用. 1977 年, 文献 [1] 研究了一类描述生理控制系统的一阶非线性延迟微分方程的动力学行为, 涵盖了振动性问题, 由此推动了延迟微分方程振动性的研究.
数值解的振动性, 得到了数值解振动的条件.
文献 [18]应用隐式 Euler 法研究了单物种人口模型的延迟 Logistic 方程
数值解的振动性, 证明了隐式 Euler 法可以保持解析解的振动性, 并研究了非振动数值解的渐近行为.
2015 年, 文献 [19] 研究了具有单峰造血率的非线性延迟微分方程
数值解的振动性.
2018 年, 文献 [20]研究了一类具有正负系数的延迟微分方程数值解的振动性.
其中
1.1 预备知识
定义1.1[3] 若函数
定义1.2[3] 若差分方程所有解是振动的, 则称此差分方程是振动的.
定义1.3[3] 考虑非线性差分方程
其中当
当
时, 线性方程
叫做 (1.1) 式对应的线性化方程.
定理1.1[3] 假设 (1.3), (1.4), (1.5)式成立且存在
下面引理是显然的
引理1.1
引理1.2
引理1.3
引理1.4 当
当
和
考虑带有初始条件
的方程 (1.1) 的解. 令
为了保证
其中
引理1.5 方程 (1.9) 中的
证 显然当
我们只需证明存在一个
即
我们先考虑
又
下面证明
记
令
当
往证
记
接下来, 若能证明
这里
得到当
令
当
2 数值解的振动性
对方程 (1.9) 应用线性
其中
有
所以方程 (2.1) 的解振动等价于方程 (2.2) 的解关于
定理2.1 数值方法 (2.2) 是收敛的, 并且当
证 当
记 (2.3) 式的解为
记 (2.4) 式的解为
记
这里
方程 (2.1) 对应的线性化方程为
由 (2.8) 式可得
将 (2.9) 式两端同时除以
对 (2.10) 式放缩
即
令
所以 (2.12) 式等价于
定理2.2 令
成立, 则方程 (2.8) 振动.
证 不妨假设方程 (2.8) 存在最终正解
由 (2.13) 式可知
为了方便, 将上式中的
则上式为
这里
对 (2.17) 式从
根据引理 1.3 得
且由 (2.18) 式得
记
根据引理 1.2 有
由引理 1.1 及 (2.22) 式可得
令
由 (2.14), (2.15) 及 (2.23) 式得
将 (2.24) 式从
我们可以看出
和
由 (2.25) 式可得
考虑 (2.16)式可知
进一步推导出
与 (2.21) 式矛盾. 所以方程 (2.8) 无最终正解, 从而也无最终负解. 这说明方程 (2.8) 振动.
3 数值算例
为了验证我们的结论, 本节给出如下算例.
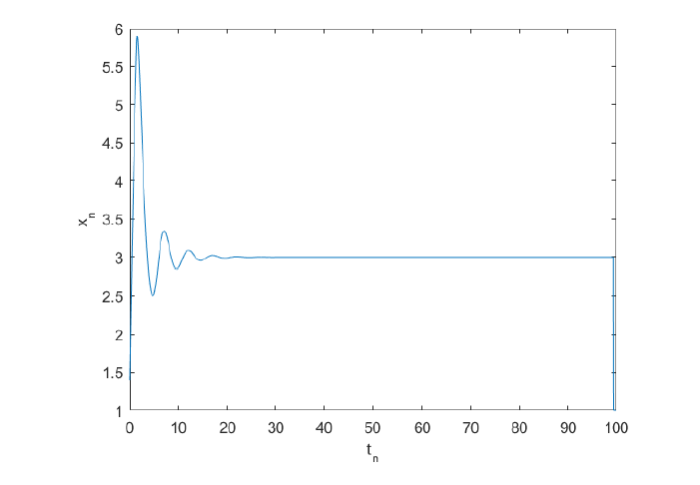
例3.1 考虑方程
其中
通过计算可得, 方程的平衡解为
取
图1
例3.2 考虑方程
其中
取
图2

参考文献
Oscillation and chaos in physiological control systems
DOI:10.1126/science.267326
PMID:267326
[本文引用: 1]

First-order nonlinear differential-delay equations describing physiological control systems are studied. The equations display a broad diversity of dynamical behavior including limit cycle oscillations, with a variety of wave forms, and apparently aperiodic or "chaotic" solutions. These results are discussed in relation to dynamical respiratory and hematopoietic diseases.
On delay differential equations with impulses
A survey on oscillation of impulsive delay differential equations
Oscillation behavior of second order nonlinear neutral differential equations with deviating arguments
An oscillation criterion of linear delay differential equations
Oscillation of higher-order canonical delay differential equations: comparison theorems
Oscillation results for third-order semi-canonical quasi-linear delay differential equations
Oscillation of second-order half-linear neutral advanced differential equations
DOI:10.1007/s42967-020-00092-4
[本文引用: 1]
The purpose of this paper is to study the oscillation of second-order half-linear neutral differential equations with advanced argument of the form<br>(<i>r</i>(<i>t</i>)((<i>y</i>(<i>t</i>) + <i>p</i>(<i>t</i>)<i>y</i>(<i>τ</i>(<i>t</i>)))')<sup><i>α</i></sup>)' + <i>q</i>(<i>t</i>)<i>y</i><sup><i>α</i></sup>(<i>σ</i>(<i>t</i>))=0, <i>t</i> ≥ <i>t</i><sub>0</sub>,<br>when <i>∫</i><sup>∞</sup> {r^{-\frac{1}{\alpha }}}(<i>s</i>)d<i>s</i> < ∞. We obtain sufficient conditions for the oscillation of the studied equations by the inequality principle and the Riccati transformation. An example is provided to illustrate the results.
A new oscillation criterion for first-order delay differential equations by iteration
Oscillation of higher order nonlinear dynamic equations with a nonlinear neutral term
Oscillation of first order neutral differential equations with delay
On oscillation of a logistic equation with several delays
Oscillations for a delayed predator-prey model with Hassell-Varley-Type functional response
DOI:10.1016/j.crvi.2015.01.002
PMID:25836016
[本文引用: 2]
In this paper, a delayed predator-prey model with Hassell-Varley-type functional response is investigated. By choosing the delay as a bifurcation parameter and analyzing the locations on the complex plane of the roots of the associated characteristic equation, the existence of a bifurcation parameter point is determined. It is found that a Hopf bifurcation occurs when the parameter τ passes through a series of critical values. The direction and the stability of Hopf bifurcation periodic solutions are determined by using the normal form theory and the center manifold theorem due to Faria and Maglhalaes (1995). In addition, using a global Hopf bifurcation result of Wu (1998) for functional differential equations, we show the global existence of periodic solutions. Some numerical simulations are presented to substantiate the analytical results. Finally, some biological explanations and the main conclusions are included. Copyright © 2015 Académie des sciences. Published by Elsevier SAS. All rights reserved.
Oscillation analysis of numerical solutions for nonlinear delay differential equations of population dynamics
单物种人口模型指数隐式 Euler 方法的振动性
Oscillations of exponential implicit Euler method for a single species population model
Oscillation analysis of numerical solutions for nonlinear delay differential equations of hematopoiesis with unimodal production rate
Oscillation analysis of numerical solutions for delay differential equations with real coefficients
Oscillations of numerical solution for nonlinear delay differential equations in food limited population model
一类非线性延迟微分方程数值解的振动性分析
DOI:10.12286/jssx.2015.4.425
[本文引用: 1]
This paper is concerned with oscillations of numerical solutions for nonlinear delay differential equation of hematopoiesis with a monotone production rate. By investigating the roots of characteristic equation, some conditions under which the numerical solution is oscillatory are obtained. The properties of non-oscillatory numerical solutions are investigated. To verify our results, we give numerical experiments.
Oscillation analysis of numerical solutions for a kind of nonlinear delay differential equation
DOI:10.12286/jssx.2015.4.425
[本文引用: 1]
This paper is concerned with oscillations of numerical solutions for nonlinear delay differential equation of hematopoiesis with a monotone production rate. By investigating the roots of characteristic equation, some conditions under which the numerical solution is oscillatory are obtained. The properties of non-oscillatory numerical solutions are investigated. To verify our results, we give numerical experiments.
混合型脉冲微分方程的数值振动性分析
Numerical oscillation analysis of the mixed type impulsive differential equation
Mackey-Glass model of hematopoiesis with monotone feedback revisited

{kind=link}
{kind=link}
{kind=link}
{kind=link}