

1 引言
考虑如下形式的 Stein 张量方程
其中矩阵
上式显然是 Stein 矩阵方程, 因此方程(1.1)称为 Stein 张量方程.
为了建立求解 Stein 张量方程(1.1)的有效算法, 先回顾一些求解线性方程组的子空间方法. 对于求解下列大型稀疏线性方程组
2 BCGSTAB 算法及其收敛性
在本节, 将提出求解 Stein 张量方程的张量格式的 BCGSTAB 算法. 为分析 Stein 张量方程解的存在性, 先给出一些基本引理.
引理 2.1 设
(1)
(2)
证 (1) 首先证明第一个等式. 事实上,
(3) 设
故
证毕.
引理 2.2[19] 设
(1) 矩阵序列
(2) 若矩阵序列
张量
式中
若将算"
(2.1) 式中
易知
如果方程组(2.1)有唯一解, 则它的系数矩阵
引理 2.3 Stein张量方程(1.1)有唯一解当且仅当对任意
基于矩阵谱条件数的定义, 即对于矩阵
根据此定义,可以得到系数矩阵
由于谱半径小于或等于任何范数, 因此可知当
显然,
由 (2.1) 式以及引理2.2, 可知
由此, 得到下面引理.
引理 2.4[19] Stein 张量方程 (1.1) 有唯一解
当且仅当
根据上述引理, 也可用部分和序列来估计Stein张量方程(1.1)的解, 即
或者表示为下面的迭代格式
若使用 (2.2) 式的部分和的形式来表示(1.1)的解, 则有如下误差估计.
引理 2.5 令
成立, 式中
证 由
证毕.
引理 2.6 令
(1)
(2)
(3)
证 (1) 注意到
(2) 由
(3) 因为
所以,
证毕.
在Krylov子空间方法中, BiCG 算法具有双正交性, 这种性质同样可以推广至张量情形中.因此文献 [19] 中提出了张量格式的 BiCG 算法, 具体如下
算法 1 (张量格式的 BiCG 算法)
步骤 1 输入初始张量
步骤 2 选取
步骤 3 计算
步骤 4 置
定义两个算子
根据张量和矩阵模式积的定义, 有下面的等量关系
下面的定理是文献 [19] 中张量格式的 BiCG 算法的双正交性质, 其具体证明过程如下
定理 2.1 设张量序列
(2.5) 式中
证 使用归纳法证明当
假设当
若
因此, 当
下面, 需证明
当
假设当
若
因此, 当
推论 2.1 设张量序列
式中
定理 2.2[19] 假设Stein张量方程 (1.1) 是相容的, 在不考虑舍入误差的情况下, 对任意的初始张量
受张量格式 BiCG 算法的启发, 给出求解 Stein 张量方程的张量格式的 BCGSTAB 迭代算法如下.
算法 2 (张量格式的 BCGSTAB 算法)
步骤 1 输入初始张量
步骤 2 选取
步骤 3 依次计算
步骤 4 置
同样, 类似于文献 [19] 的证明, 容易得到算法2 的收敛性定理.
定理 2.3 假设 Stein 张量方程 (1.1) 是相容的, 在不考虑舍入误差的情况下, 对任意的初始张量
3 数值实验
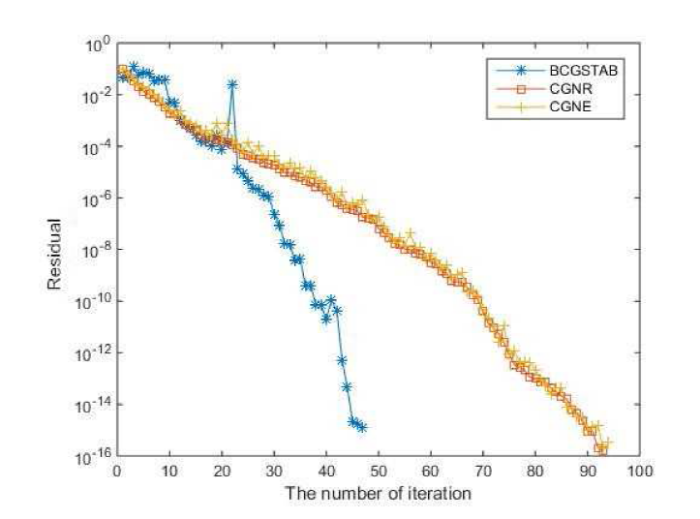
本节, 将给出几个数值例子来说明我们提出算法的有效性, 并且将提出的算法与张量格式的 CGNR (关于法方程残差的共轭梯度) 算法和 CGNE (关于法方程误差的共轭梯度) 算法进行比较. 所有实验都是在如下环境中实现的: Windows 10 系统, 处理器Intel(R) Core(TM) i5-6500 CPU 3.20GHz, 8GB RAM. 利用 Matlab R2014b 软件环境以及 Bader 和 Kolda 开发的 MATLAB 张量工具箱执行实验. 在实验过程中, 记录了所需的迭代次数("IT")、 所消耗的 CPU 时间(以秒为单位, 记为 "CPU"),在数值实验中, 初始张量取为
下面两个算法分别是张量格式的CGNR算法和CGNE算法.
算法 3 (张量格式的 CGNR 算法)
步骤 1 输入初始张量
步骤 2 计算
步骤 3 依次计算
步骤 4 置
算法 4 (张量格式的 CGNE 算法)
步骤 1 输入初始张量
步骤 2 计算
步骤 3 依次计算
步骤 4 置
例 3.1 求解下面Stein张量方程的解:
下面列出随机生成的
图1
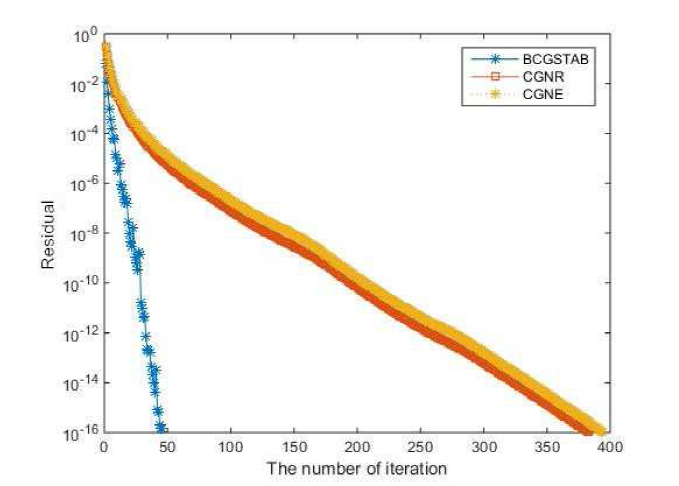
例 3.2 求解下面Stein张量方程的解
其中系数矩阵
初始张量
图2
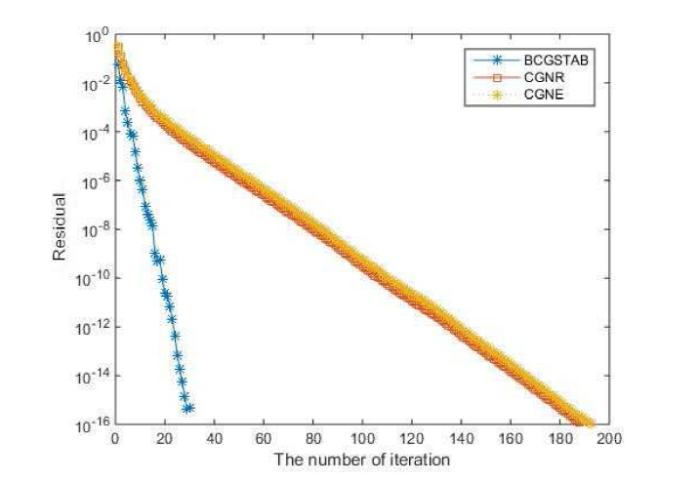
图3
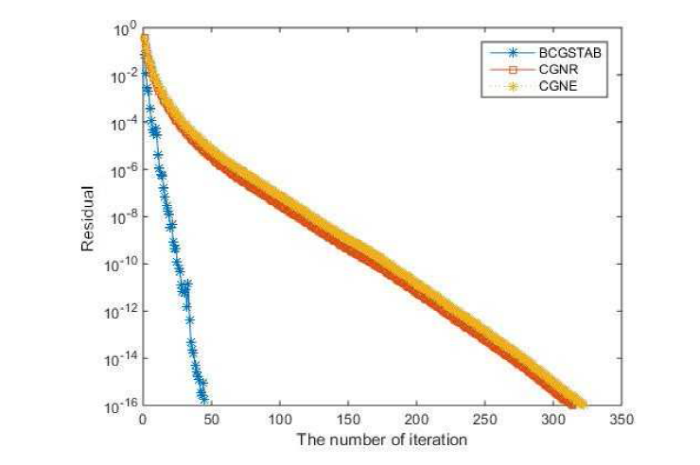
图4

4 小结
本文针对下列 Stein 张量方程方程
参考文献
Methods of conjugate gradients for solving linear systems
Solution of sparse indefinite systems of linear equations
Solution of systems of linear equations by minimized iterations
GMRES: A generalized minimal residual algorithm for solving nonsymmetric linear systems
Variational iterative methods for nonsymmetric systems of linear equations
An extension of the conjugate residual method to nonsymmetric linear systems
Krylov subspace methods for linear systems with tensor product structure
Bi-CGSTAB: A fast and smoothly converging variant of Bi-CG for the solution of nonsymmetric linear systems
Variants of BICGSTAB for matrices with complex spectrum
GPBi-CG: Generalized product-type methods based on Bi-CG for solving nonsymmetric linear systems
On smith-type iterative algorithms for the stein matrix equation
Possible inertia combinations in the stein and lyapunov euations
A functional approach to the stein equation
On the solution of sylvester, lyapunov and stein equations over arbitrary rings
On solving the lyapunov and stein equations for a companion matrix
A note on the
Extending BiCG and BiCR methods to solve the Stein tensor equation
On RGI algorithms for solving sylvester tensor equations
Preconditioned tensor format conjugate gradient squared and biconjugate gradient stabilized methods for solving stein tensor equations

{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}