

1 引言
LKF 时间导数中积分项的存在使得获取 LKF 时间导数的准确上界很难. 近些年来, 学者们提出了多种方法和技术估计LKF 的导数, 如广义模型变换[3], 自由加权矩阵[20], 积分不等式方法[2,4,10,13,17⇓-19,22,24,25], 其中积分不等式方法是重要的方法之一. 文献 [17] 基于 Jensen 不等式提出了 Wirtinger 不等式, 用于获得时滞系统的稳定性; 文献 [13] 提出了贝塞尔-勒让德不等式, 研究了时变时滞系统的时滞相关稳定性. 然而, 一般情况下, 各种方法都很难做到 '估计精度' 与 '运算简便性' 同时兼顾. 例如, 利用自由矩阵可减少估计的保守性, 但自由矩阵的出现使得在后续计算中比较麻烦; Wirtinger 不等式较 Jensen 不等式虽提高了估计精度, 却增加了运算量. 这为处理 LKF 时间导数中积分项的估计方法的改进留下了很大的空间. 在这一思想的启发下, 本文将提出一个基于含参函数构造方法的扩展 Wirtinger 不等式, 其在不增加计算负担的情况下, 能够获得 LKF 时间导数的精确估计.
符号: 在本文中,
2 问题表述
考虑以下具有加性时变时滞的连续系统
其中,
其中,
利用以下引理来发展时变时滞系统的稳定性准则.
引理 2.1[17] (Jensen 不等式) 给定
引理 2.2[17] (Wirtinger 不等式) 给定
引理 2.3[17] 给定
引理 2.4[11] (扩展互凸矩阵不等式) 对于标量
引理 2.5(三阶矩阵负定等价条件) 对给定的矩阵
证 矩阵
证毕.
引理 2.6 (基于三阶矩阵的扩展互凸不等式) 对于标量
证 定义
依据引理 2.5, 有
在上式的基础上, 左乘
移项, 代入
3 不同角度论证 Wirtinger 不等式
1) 单调性角度
证 对于有连续导数的函数
容易验证函数
由引理 2.3 并结合引理 2.1, 有
进一步将上述式 (3.2) 和式 (3.3) 结合, 下式成立
其中,
由于 Wirtinger 不等式是 Jensen 不等式的改进, 得
2) 增加正项角度
证 给定任意一个对称正定矩阵
显然, 上述构造满足
对
应用引理 2.1 以及引理 2.3 估计
式 (3.9) 与引理 2.2 中不等式的唯一区别在于不等式 (3.9) 中含有项
注 3.1 综合考虑 '估计精度' 以及 '运算简便性' 两因素, Wirtinger 不等式作为应用较为广泛的积分不等式之一需要被深入理解. 本文选择从单调性和增加正项两个角度出发进行了论证. 选择这两个角度的原因如下
1) 单调性角度: 借鉴文献 [18] 中 Wirtinger 不等式的构造函数方法, 我们选择采用含参构造方法, 从单调性角度进行论证; 采用单调性角度, 能够更为直观地衡量积分不等式的估计精度是否得到提升, 并且更容易进行推广.
2) 增加正项角度: 鉴于增加正项能提升积分不等式估计精度的直观观念以及时滞分解 LKF 的广泛应用, 我们选择增加正项
4 扩展 Wirtinger 不等式
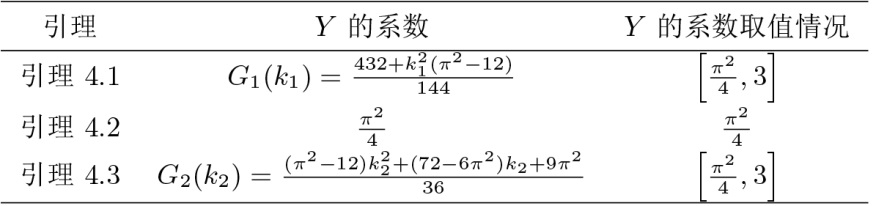
引理 4.1 给定任意一个对称正定矩阵
其中,
证 对于有连续导数的函数
依据式 (4.2) 进行简单的运算, 有
在 (4.3) 等式两边同时增加项
限定常复数
运用引理 2.1, 引理 2.3 对式 (4.4) 中的项
将定界的式 (4.5) 以及式 (4.6) 代入式 (4.4) 中, 结论得证.
注 4.1 本文所提出的扩展 Wirtinger 不等式相较于现有的多种方法更具通用性. 例如, 当
引理 4.2 给定任意一个对称正定矩阵
其中,
引理 4.3 给定任意一个对称正定矩阵
其中
注 4.2 引理 4.3 虽然被视为引理 4.1 的一个特例, 但它仍然具有更广泛的适用性, 相比现有的许多方法更加通用. 举例来说, 当
注 4.3 本文提出的引理 4.3 为一种积分不等式, 能够在
此时, 积分不等式的上界将在引理 2.1 的基础上逐步增大且最大上界与引理 4.2 相同.
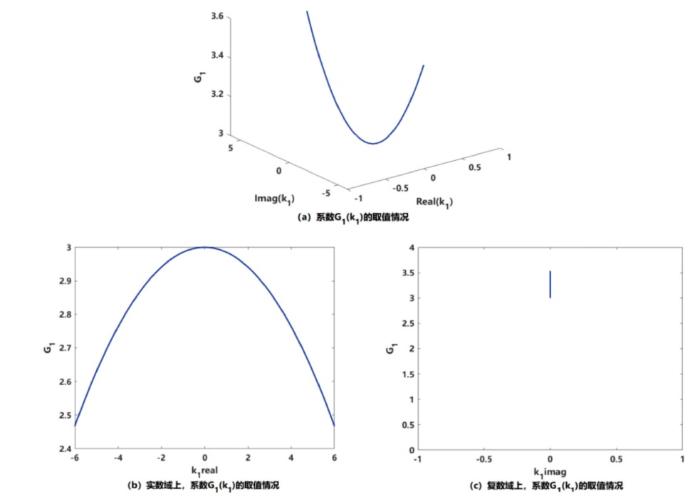
注 4.4 本文提出的扩展 Wirtinger 不等式在求解积分上界时, 能够比原有 Wirtinger 不等式获得更加精确的结果. 为了进一步说明其优越性, 我们对系数
图1
5 主要结论
在本节中, 我们将基于扩展不等式, 给出加性时变时滞系统的保守性较低的稳定性准则. 简单起见, 定义以下向量和矩阵
定理 5.1 给定标量
其中
证 构造以下 LKF,
对
使用引理 4.1, 对上述积分项进行估计, 结果如下
接着, 运用引理 2.4 对上述式子进行处理
可以获得
综上所述, 有
基于凸组合技术, 下式成立则保证了
依据引理 2.5, 如果式 (5.1)-(5.4) 成立则成立, 结论得证.
注 5.1 在上述推导过程中, 我们使用了引理 4.1 对积分项进行了估计. 此外, 本文中的引理 2.1, 引理 2.2, 引理 4.2 和引理 4.3 等均可只改变
定理 5.2 给定标量
证 本定理的证明类似于定理 5.1, 此处只给出不同于定理 5.1 的部分, 即本定理利用引理 2.6 对式 (5.6) 进行估计, 估计如下
其余步骤与定理 5.1 相同, 从而证明完成.
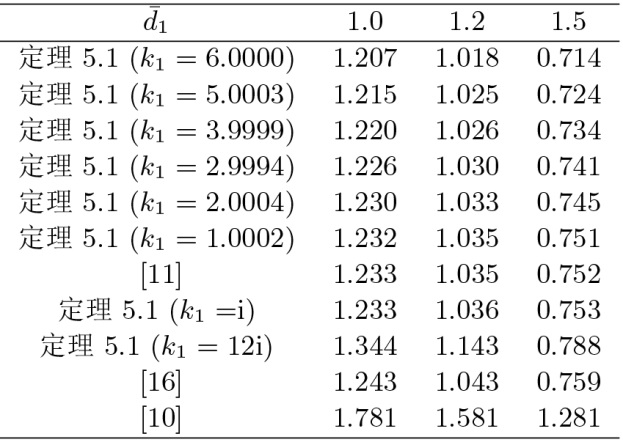
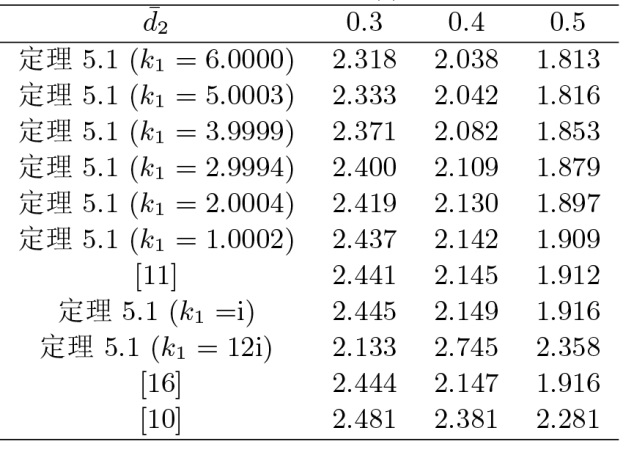
6 数值实例
在本节中, 应用一个经常用到的数值例子来验证所提出的扩展不等式的优越性. 考虑具有以下参数的系统 (2.1)
假设时滞导数上界
注 6.1 关于


注 6.2 本节所采用的仿真实验平台为 MATLAB, 我们利用其内置的线性矩阵不等式 (LMI) 工具箱来求解线性矩阵不等式.
7 结语
本文首先从单调性和增加正项两个角度对 Wirtinger 不等式进行了论证. 接着, 提出了扩展不等式, 其中包括一个扩展 Wirtinger 不等式和一个基于三阶矩阵的扩展互凸不等式. 然后, 分别利用这两个扩展不等式, 给出了加性时变时滞系统的稳定性准则. 最后, 通过数值算例说明了扩展不等式的优越性. 在未来的研究工作中, 将试图从更多角度深入探讨以改进积分不等式来提高时滞系统的稳定性. 具体而言, 可从巧妙选择正项, 优化构造函数, 引入辅助不等式, 引入含参函数以及充分利用单调性等角度思考.
参考文献
Stability analysis of discrete-time system with slowly time-varying delays
DOI:10.1016/j.procs.2022.01.127 URL [本文引用: 1]
A generalized multiple integral inequality with application to time-varying delay systems
New Lyapunov-Krasovskii functionals for stability of linear retarded and neutral type systems
Multiple-integral inequalities to stability analysis of linear time-delay systems
Improved results on stability analysis of time-varying delay systems via delay partitioning method and Finsler's lemma
Delay-dependent stability analysis of linear time delay systems
A note on Wirtinger-type integral inequalities for time-delay systems
A discrete delay decomposition approach to stability of linear retarded and neutral systems
Novel stability criterion for linear system with two additive time-varying delays using general integral inqualities
A novel integral inequality and its application to stability analysis of linear system with multiple time delays
An extended reciprocally convex matrix inequality and its application to stability analysis of systems with additive time-varying delays
On the time-varying Halanay inequality with applications to stability analysis of time-delay systems
Stability analysis of systems with time-varying delays via the second-order Bessel-Legendre inequality
A delay decomposition approach to robust stability analysis of uncertain systems with time-varying delay
New free-matrix-based integral inequality: Application to stability analysis of systems with additive time-varying delays
Reciprocally convex approach to stability of systems with time-varying delays
Jensen's and Wirtinger's inequalities for time-delay systems
Wirtinger-based integral inequality: Application to time-delay systems
A new integral inequality and application to stability of time-delay systems
New delay-dependent stability criteria and stabilizing method for neutral systems
Improved delay-dependent robust stability criteria for uncertain time delay systems
Improved stability criteria for linear systems with time-varying delays
DOI:10.1016/j.jfranklin.2021.07.045
[本文引用: 1]

This paper is concerned with the stability analysis of linear systems with time-varying delays. First, by introducing the quadratic terms of time-varying delays and some integral vectors, a more suitable Lyapunov-Krasovskii functional (LKF) is constructed. Second, two new delay-dependent estimation methods are developed in the stability analysis of linear system with time-varying delays, which include a reciprocally convex matrix inequality and an integral inequality. More information about time-varying delays and more free matrices are introduced into the two estimation approaches, which play a key role for obtaining an accurate upper bound of the integral terms in time derivative of LKFs. Third, based on the novel LKFs and new estimation approaches, some less conservative criteria are derived in the form of linear matrix inequality (LMI). Finally, three numerical examples are applied to verify the advantages and effectiveness of the newly proposed methods. (c) 2021 The Franklin Institute. Published by Elsevier Ltd.
Hierarchical stability conditions for time-varying delay systems via an extended reciprocally convex quadratic inequality
New method for stability of systems with time-varying delay via improved free-matrix-based integral inequality
Stability analysis for linear time-delay systems using new inequality based on the second-order derivative
DOI:10.1016/j.jfranklin.2019.03.038
[本文引用: 1]
This paper studies the stability problem of linear time-varying delay system. Firstly, a double integral inequality based on the second-order derivative is proposed in this paper. Secondly, novel Lyapunov-Krasovskii functional consisting of integral terms based on the second-order derivative is constructed to enhance the feasible region of delay-dependent stability. Based on the two aspects, new delay-dependent stability criteria which guarantee the asymptotic stability of linear systems with time-varying delay are given in the form of linear matrix inequality (LMI). Finally, several numerical examples are given to show the advantages of the proposed methods. (C) 2019 The Franklin Institute. Published by Elsevier Ltd.
An improved summation inequality to discrete-time systems with time-varying delay
Stability analysis for linear delayed systems via an optimally dividing delay interval approach
An improved reciprocally convex inequality and an augmented Lyapunov-Krasovskii functional for stability of linear systems with time-varying delay

{kind=link}
{kind=link}