

1 引言
对于两体系统, 量子失协被定义为两个经典等效互信息表达式在量子世界中的最小差异[13,14]. 两体量子态
在此基础上, 本文研究一类含有四个实参的三量子比特 X 态几何量子失协给出其解析表达式, 进一步研究在相位翻转信道下该类态几何量子失协的动力学行为.
2 预备知识
本节给出多体量子和几何失协的定义. 此外, 陈述一类三量子比特 X 态在条件测量下几何失协的结果.
Radhakrishnan 等人基于信息论提出多体量子失协. 这种方法的主要特征之一就是使用了条件测量, 其中每个连续的测量都与先前测量有条件地相关. 对于希尔伯特空间
其中,
记
定义
其中
用符号
设量子态
其中
易见, 对任意的
定义 2.1 几何量子失协定义为已知量子态
其中,
希尔伯特空间
其中
对
其中
显然
与之对应的概率分布
若子系统 A 上的测量结果为
与之对应的概率分布为
显然
那么
设
可知
由定义可得
综上所述我们可以得到
3 三量子比特 X 态的几何量子失协
本节运用拉格朗日乘数法解决优化问题, 获得几何量子失协的解析表达式.
定理 3.1 希尔伯特空间
其中
证 首先, 由 (2.31) 式得
现在我们只需考虑
是关于
由
设拉格朗日函数
由 (3.5) 式可得
情况 1 若
(a) 若
(b) 若
(c) 若
情况 2 若
(a)
(b)
情况 3 若
(a)
(b)
情况 4 若
(a)
(b)
情况 5 若
综上
情况 6 对
由上可知
情况 7 对
情况 8 对
由上可知
综上可知, c:=
证毕.
图1
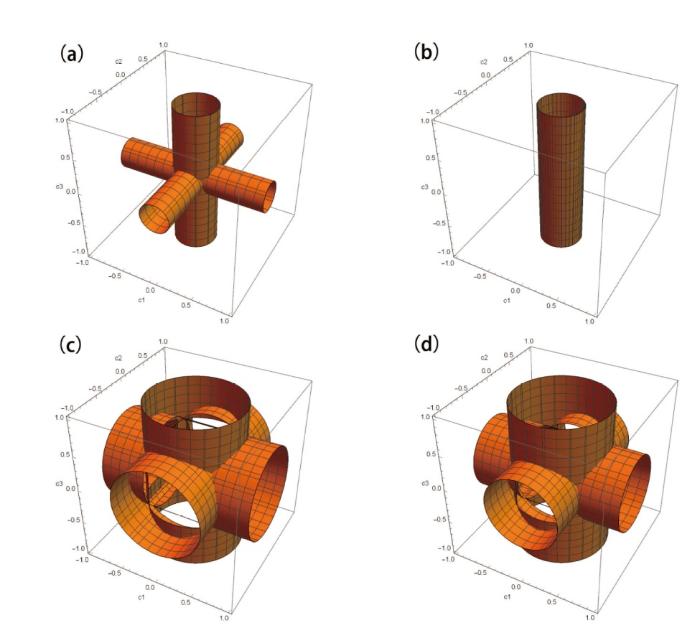
图1
几何量子失协等高图
4 相位翻转下几何量子失协的动力学行为
假设 (2.4) 式给出的三量子比特 X 态
其中
若初始态
该类态
图2 给出了当参数
图2
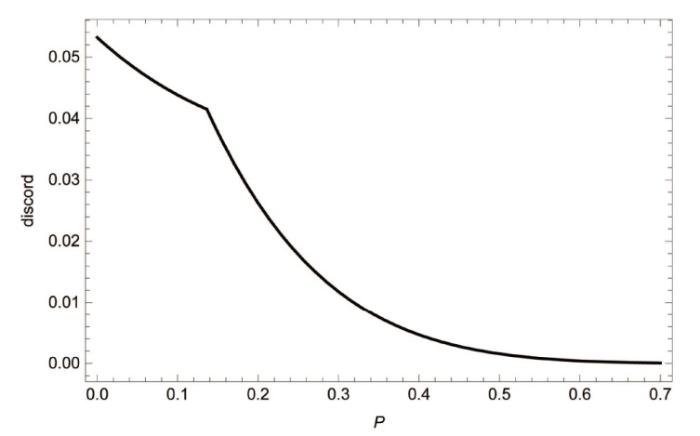
图2
相位翻转下的几何量子失协:
参考文献
Quantum discord: A measure of the quantumness of correlations
Classical, quantum and total correlations
Experimental quantum computing without entanglement
The power of discord: Physicists have always thought quantum computing is hard because quantum states are incredibly fragile
Total versus quantum correlations in quantum states
Sudden transition between classical and quantum decoherence
Multipartite nonlocality without entanglement in many dimensions
Robustness of quantum discord to sudden death
Classical correlation and quantum discord in critical systems
Quantum discord as resource for remote state preparation
Quantum discord and quantum phase transition in spin chains
Quantum discord as a resource for quantum cryptography
Global quantum discord in multipartite systems
Multipartite generalization of quantum discord
Geometric discord for multiqubit systems
Classical and quantum correlations under decoherence
Quantum open system theory: Bipartite aspects

{kind=link}
{kind=link}
{kind=link}
{kind=link}