

1 引言
其中
其中
其中
受上述工作启发, 我们建立如下具有无穷分布时滞和反馈控制的周期阶段结构单种群模型
这里
文章内容安排如下: 第 2 节中我们引入一些假设和引理; 在第 3 节, 我们得到系统 (1.4) 的持久性及正周期解存在性的充分性判别条件; 最后通过数值模拟演示了理论结果.
2 预备知识
为方便起见, 定义
对于模型(1.4) 我们作以下假设
(H1)
(H2)
令
这里
接着引入一些定义以及引理便于后续证明.
定义 2.1[5] 称系统 (1.4) 是持久的, 若对系统 (1.4) 满足初始条件 (2.1) 的任意正解
考虑下列泛函微分方程
其中
引理 2.1[16] 假设系统 (2.2) 是合作的, 若
则有
这里
继续考虑非自治 Logistic 方程
其中
引理 2.2[10] 若
接着考虑下列非自治线性方程
这里
引理 2.3[17] 若
引理 2.4[17] 令
引理 2.5 如果条件 (H1) 成立, 则模型 (1.2) 存在唯一全局渐近稳定的正周期解.
证 类似文献 [4,定理 6] 我们将分三部分证明. 首先证明系统 (1.2) 的持久性; 其次给出周期解的存在性; 最后证明系统 (1.2) 周期解的唯一性和全局渐近稳定性.
显然
Cui 等[4,引理 3] 已经证明了
应用文献 [4, 引理 4, 定理 5] 易得
接着证明系统 (1.2) 的任意正解是最终有界的. 令
易得
因此,
所以系统 (1.2) 是持久的. 其次微分方程解的存在性问题往往归结为算子方程不动点的存在性问题. 因此我们利用 Schauder 不动点定理[18]证明模型 (1.2) 周期解的存在性, 为此构造集合
由模型 (1.2) 可得
类似文献 [4, 引理 3] 的证明, 不难验证下列模型 (2.6) 在条件
显然当
这里令
定义 Poincare 周期映射
这里
最后我们证明周期解的唯一性和稳定性. 将系统 (1.2) 改写成
这里
其中
不难证明上述系统定义在
引理 2.5 证明完毕.
3 主要结果
下面我们分四个部分证明系统 (1.4) 的持久性, 并根据文献 [22, 定理 1] 得到系统 (1.4) 正周期解的存在性.
定理3.1 假设 (H1) 与 (H2) 成立, 则满足初始条件 (2.1) 的系统 (1.4) 在
证 对于任意
由于
首先证明解的最大存在区间是
对于任意
因此构造辅助系统
根据引理 2.5 可得当假设 (H1) 成立时有
接着根据引理 2.1 可得
因此
由
令
因此, 由 (3.1) 式可得
所以
由引理 2.4, 我们进一步得到对于任意
对于模型 (1.4) 的第三个方程我们有
此时构造辅助系统
根据引理 2.2 以及假设 (H2) 可得存在正数
接着由引理 2.1, 易得
不妨令
且存在正数
综上定理 3.1 证毕.
定理 3.2 假设 (H1) 与 (H2) 成立, 令
则存在常数
证 根据定理 3.2 的条件我们可以选择充分小的正数
对于任意正数
根据假设 (H1), 对于充分小的正常数
则由引理 2.5 可得模型 (3.5) 存在唯一全局渐近稳定的周期解
另外通过解关于参数的连续性可得当
接着由
下面我们分两部分讨论, 首先证明
假设结论不成立, 则对于任意
因此存在
此外选择正数
其中
则对于
根据引理 2.1 可得
其中
进一步由 (3.6), (3.8) 和 (3.9) 式可得
此时存在
对上式两边从
我们继续证明定理 3.3 的结果. 假设结论不成立, 则系统 (1.4) 存在一个初始函数序列
根据 (3.7) 式, 对于任意正整数
使得
由定理 3.1 可知, 对于任意正整数
这里
对上式从
这里
接着根据 (3.11) 式, 对于任意正整数
以及存在常数
由 (3.12) 式, 存在正整数
根据引理 2.1 易得
其中
由 (3.11) 式, 存在正数
其中
因此对于
对上式从
因此应用 (3.4) 式易得
显然这是矛盾的, 所以定理 3.2 结论成立, 定理 3.2 证明完毕.
定理 3.3 若定理
证 根据
对于任意正数
根据假设 (H1), 存在充分小的正数
则由引理 2.5 可得模型 (3.15) 存在唯一全局渐近稳定的周期解
进一步由
类似于文献 [14, 定理 3] 的证明过程, 我们将分两部分完成. 首先证明
假设结论不成立, 则对于系统 (1.4) 存在一个满足初始条件 (2.1) 的正解
因此存在
此外选择常数
这里
所以当
由 (3.14) 式易得当
接着当
根据引理 2.1 易得
这里
因此由 (3.16), (3.19) 和 (3.20) 式我们得到
这与 (3.18) 式矛盾, 因此 (3.17) 式成立.
我们继续证明定理 3.3, 假设结论不成立, 则模型 (1.4) 存在一个初始函数序列
由 (3.17) 式易得对于每一个
且
由定理 3.1 可知, 对于任意正整数
这里
这里
由 (3.14) 式, 选择常数
对于任一正整数
以及存在正数
由 (3.24) 和 (3.25) 式可得存在正数
其中
由 (3.14) 式, 对上述不等式从
根据 (3.25) 和 (3.28) 式可得, 当
所以对于
因此根据引理 2.1 可以得到
此时, 我们令
所以,
显然这与 (3.22) 式矛盾, 因此定理 3.3 得证. 证毕.
定理 3.4 假设 (H1) 与 (H2) 成立, 令
则系统 (1.4) 是持久的.
证 结合定义 2.1 以及定理 3.1-3.3, 我们仅需证明存在正数
应用定理 3.1 和 3.3 的结论, 对于系统 (1.4) 的第一个方程有
构造辅助系统
根据引理 2.3 以及假设 (H2) 可得对于辅助系统 (3.29) 的任意正解
由引理 2.1 易得
对所有
此时令
结合定理 3.1-3.3, 定理 3.4 证明完毕.
由周期系统周期解的存在性定理[22], 即: 若周期系统是持久的, 则至少存在一个正周期解. 我们有以下结果
推论 3.1 若定理 3.4 的条件成立, 则模型 (1.4) 至少存在一个正周期解.
4 数值模拟
本节我们选取一些具有生物意义的参数演示理论结果. 首先令
接着类似于文献 [23] 的方法, 令连续
其中
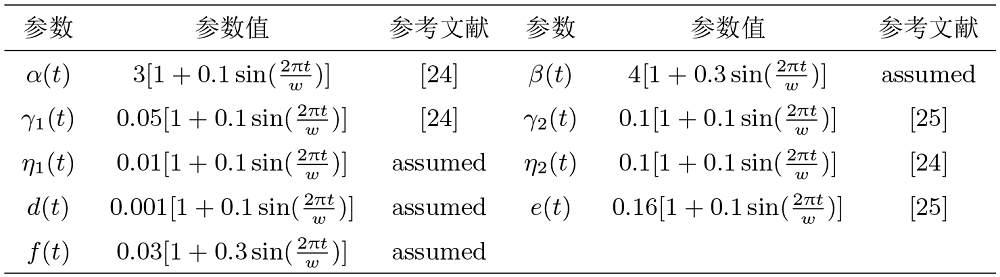
容易验证假设 (H1), (H2) 成立, 故由引理 2.5 可得系统 (1.2) 存在全局渐近稳定的周期解
图1

图1
辅助系统 (1.2) 的动力学行为. 左: 时间序列图; 右: 二维相图. 模型的初值为
不妨取
图2
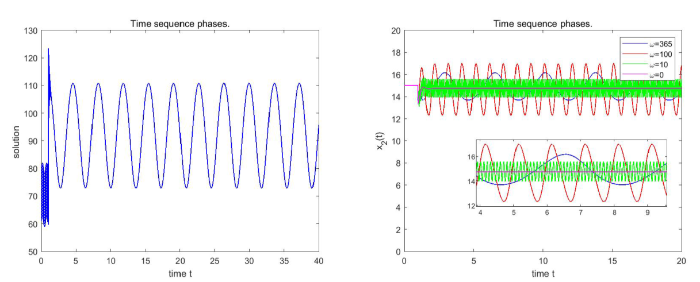
图2
左: 系统 (3.2) 的时间序列图. 模型的初值为
可得定理 3.4 的条件成立, 因此, 根据定理 3.1-3.4 以及推论 3.1 可得模型 (1.4) 是持久的并且存在正周期解, 图3演示了上述结果.
图3
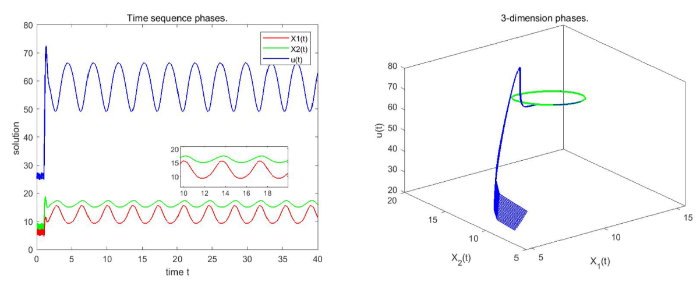
图3
左: 系统 (1.4) 的时间序列图; 右: 系统 (1.4) 的三维空间相图. 模型的初值为
最后, 研究周期性对模型 (1.4) 的影响. 从图 2 右图中可以看到, 无周期时
5 结论
具有无穷分布时滞和反馈控制的种群模型已经受到了广泛关注, 本文研究了一类具有反馈控制与无穷分布分布时滞的周期阶段结构单种群模型. 通过分析方法, 以积分的形式给出了系统持久性以及正周期解存在性的充分条件. 最后借助数值模拟演示了文中结果.
参考文献
A nonautonomous model of population growth
With x = population size, the nonautonomous equation x = xf(t, x) provides a very general description of population growth in which any of the many factors that influence the growth rate may vary through time. If there is some fixed length of time (usually long) such that during any interval of this length the population experiences environmental variability representative of the variation that occurs in all time, then definite conclusions about the population's long-term behavior apply. Specifically, conditions that produce population persistence can be distinguished from conditions that cause extinction, and the difference between any pair of solutions eventually converges to zero. These attributes resemble corresponding features of the related autonomous population growth model x = xf(x).
Note on the persistent property of a feedback control system with delays
Recent progress on stage-structured population dynamics
The effect of dispersal on population growth with stage-structure
Dynamical behaviour of a Lotka-Volterra competitive-competitive-cooperative model with feedback controls and time delays
Feedback regulation of logistic growth
A mathematical study of a prey-predator model in relevance to pest control
基于生态环境和反馈控制的多种群竞争系统的正周期解
Positive periodic solution of multiple species comptition system with ecological environment and feedback controls
A model for pest control using integrated approach: Impact of latent and gestation delays
Permanence and extinction of periodic predator-prey systems in a patchy environment with delay
Extinction in a nonautonomous competitive system with toxic substance and feedback control
Note on the permanence of a competitive system with infinite delay and feedback controls
Existence of positive periodic solutions of a delayed periodic Microcystins degradation model with nonlinear functional responses
一类具有时滞及反馈控制的非自治非线性比率依赖食物链模型
On a Nonlinear non-autonomous ratio-dependent food chain model with delays and feedback controls
Periodic and almost periodic solutions for a non-autonomous respiratory disease model with a lag effect
Permanence for a delayed periodic predator-prey model with prey dispersal in multi-patches and predator density-independent
Permanence of the nonautonomous competitive systems with infinite delay and feedback controls
Applications of Schauder's fixed-point theorem with respect to iterated functional equations
Monotone Dynamical Systems: An Introduction to the Theory of Competitive and Cooperative Systems
高维时滞周期的 Kolmogorov 型系统的正周期解
DOI:10.12387/C1999072
[本文引用: 2]

本文应用Banach空间中的Horn不动点定理得到了高维时滞的周期Kolmogorov型生态系统的正周期解存在性定理.作为这个定理的应用,讨论了几类时滞的周期Lotka-Volterra型系统的正周期解的存在性问题、建立了新的实用的判别准则.
The positive periodic solutions of periodic Kolmogorov type systems with delays
DOI:10.12387/C1999072
[本文引用: 2]
本文应用Banach空间中的Horn不动点定理得到了高维时滞的周期Kolmogorov型生态系统的正周期解存在性定理.作为这个定理的应用,讨论了几类时滞的周期Lotka-Volterra型系统的正周期解的存在性问题、建立了新的实用的判别准则.
A delayed stage-structure brucellosis model with interaction among seasonality, time-varying incubation and density-dependent growth
Rich dynamics of a delay-induced stage-structure prey-predator model with cooperative behaviour in both species and the impact of prey refuge
Stability and Hopf bifurcation for a delayed predator-prey model with stage structure for prey and Ivlev-type functional response

{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}