

1 引言
众所周知, 弹性薄板具有广泛的工程应用背景, 如航天器、太阳帆板、旋转机翼以及螺旋桨桨叶等. 以弹性薄板为构件的柔性体, 用刚体动力学的理论和方法来研究弹性板的变形与振动. 在经典弹性板振动理论中, Kirchhoff 板模型是最为重要的经典薄板振动模型之一. 如果当弹性板具有一定的厚度且在板振动过程中考虑横向剪切效应时, 得到相应的板振动模型即为 Mindlin-Timoshenko 板模型 (系统), 因此 Mindlin-Timoshenko 板模型 (系统) 能更准确地描述具有一定厚度弹性板的振动.
本文将文献 [2] 推广到更一般情形, 更精确地说, 考虑如下的具有局部内部阻尼的二维 Mindlin-Timoshenko 板方程的初边值问题
其中
本文应用线性算子半群理论、分片乘子法以及 Hilbert 空间中线性系统指数稳定的频域结果, 得到了系统的适定性以及指数稳定性. 本文的安排如下: 在第 2 节中, 通过适当的假设将系统转换为抽象 Cauchy 问题. 在第 3 节中, 应用 Pazy[14] 的 Lumer-Phillips 定理证明了系统的适定性. 在第 4 节中, 运用分片乘子法以及系统稳定性的频域结果结合矛盾讨论, 证明了系统是指数稳定的.
2 预备知识
定义系统 (1.1) 在
对于充分光滑的
和双线性泛函
经过简单计算, 我们得到
进一步, 对所有充分光滑的
即有以下等式成立
由 (2.1)式, 我们将系统 (1.1) 改写为
引入函数空间
其中
具有内积
设空间
具有内积
记
具有内积
定义
于是系统 (1.1) 改写为
其中,
3 适定性
定理 3.1 线性算子
证 首先, 由算子
因此, 我们有
这就说明了线性算子
接着, 我们将证明: 存在充分小的
即对给定的
即
因此,
为得到结果, 我们将运用 Lax-Milgram 定理证明 (3.2) 式存在唯一弱解.
对于任意
其中
以及
显然,
因此, 由式 (3.5) 得
故
特别地, 我们取
从而
取
因此, 对于任意的
定理 3.2 对于任意的
且
若
4 指数稳定
注意到边界
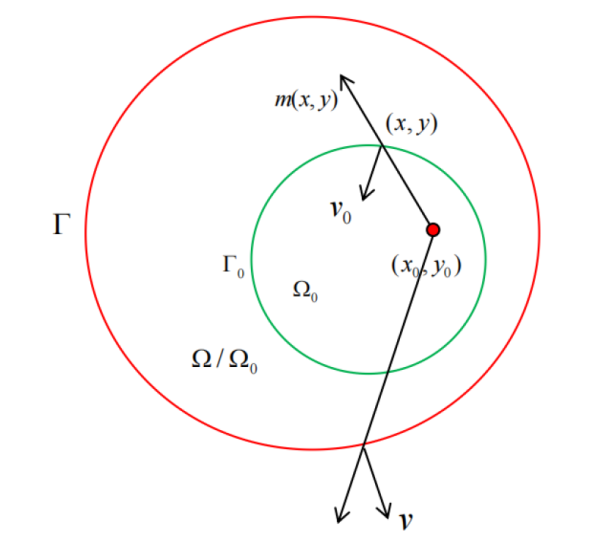
假设 1 (几何光学条件) 设
都有
“几何光学条件”指的是区域 (其强调的是区域的边界). 例子示意如图1所示.
图1
引理 4.1 线性算子
证 定义算子
和
以及
因此
这里
类似于文献 [9,引理 3.2] 的证明, 容易验证算子
即
根据 Sobolev 嵌入定理知
且
所以, 当
引理 4.2
证 若结论不成立, 由于
由 (3.1) 式有
因而在
引理 4.3[16] Hilbert 空间
定理 4.4 在假设1下,
证 由引理 4.2, 故只需证明式 (4.3). 下面将采用反证法.
假设式 (4.3) 不成立, 即
由共鸣性定理和预解式的连续性可知, 存在
在
其中, 在
在
且
因此, 在
由于
在
即
故由 (4.10) 和 (4.11)式相加并取实部得
由 (4.4) 和 (4.12)式可得
由 (4.6) 和 (4.13)式得到
将(4.6)式代入 (4.7)式, 并消去
同理有
接下来, 我们将运用分片乘子法证明预期的结果.
取
用
同理有
为了书写方便起见, 置
其中
即
两边取实部得
同理, 对 (4.24) 和 (4.26)式采用相同的方法, 有
由 (4.28), (4.29) 和 (4.30)式得
另一方面, 对 (4.23) 式应用 Green 公式
由边界条件以及函数
同理
以及
所以
其中
将
结合 (4.28)-(4.31) 和 (4.37) 式, 我们有
根据几何光学条件
故由 (4.9) 与 (4.39) 式推得
与 (4.13) 式矛盾, 从而完成定理 4.4 证明.
参考文献
Internal stabilization of a Mindlin-Timoshenko model by interior feedbacks
Asymptotic behavior of a Mindlin-Timoshenko plate with viscoelastic dissipation on the boundary
Stabilization of a thermoelastic Mindlin-Timoshenko plates model revisited
Polynomial decay rate of a thermoelastic Mindlin-Timoshenko plates model with Dirichlet boundary conditions
Indirect stabilization of a Mindlin-Timoshenko plates
二维 Mindlin-Timoshenko 板系统的稳定性与最优性
Stability and optimality of 2-D Mindlin-Timoshenko plate system
Stabilization of 2-d Mindlin-Timoshenko plates with localized acoustic boundary feedback
Locally distributed control and damping for the conservative systems
A new method to obtain decay rate estimates for dissipative systems
Exponential decay of energy of the Euler-Bernoulli beam with locally distributed Kelvin-Voigt damping
Piecewise multiplier method and nonlinear integral inequalities for Petrowsky equation with nonlinear dissipation
Stabilization of transmission system of Kirchhoff plates and wave equations with a localized Kelvin-Voigt damping
Characteristic conditions for exponential stability of linear dynamical systems in Hilbert spaces

{kind=link}
{kind=link}