

1 引言
其中
其中
令
为了记号的简单省略掉字母上面的尖号, 模型(1.3) 变为
近年来, 生化系统中种群间相互作用的时空模式已成为研究的主流课题. 其兴趣之一是多种群相互作用的模型种群之间是否可以共存. 当种群是齐次分布时,共存意味着模型达到一个常数平衡点. 然而当种群非齐次分布时,共存意味着有非常数稳态解, 也就是所谓的稳态模式. 自从奠基性论文[25]之后, 扩散和交错扩散是产生稳态模式的主要因素.
目前不清楚Michaelis-Menten型收获是否会影响模型(1.1) 的动力学特性. 本文的主要目的是研究Michaelis-Menten型收获对模型(1.1) (即(1.4))的动力学特性和稳态模式的影响. 本文结构安排如下: 第二节研究模型(1.4) 的一致持久性. 第三节研究非负常数平衡解的局部稳定性, 并且利用Lyapunov函数和上下解方法研究正常数平衡解的全局渐近稳定性. 第四节研究模型(1.4) 对应稳态系统的非常数正解的存在和不存在性. 第五节是本文结论.
2 一致持久性
本节研究模型(1.4) 的持久性, 其含义是无论扩散系数如何, 食饵和捕食者在生存区域内的任何时间任何地方可以永久共存下去.
命题2.1 模型(1.4) 的所有解非负, 并且其非负解
证 由于初值非负, 因此模型(1.4) 解的非负性是显然的. 下面只需讨论有界性. 因为
所以由抛物方程的比较原理可得(2.1) 式中的第一个不等式. 这时存在
由比较原理可得
由
定义2.1 对任意非负初值
则称模型(1.4) 是一致持久的.
命题2.2 如果
证 注意到
并且
于是, 对任意
由比较原理以及
证毕.
3 非负常数平衡解及其稳定性
假设
(H1)
(H2)
(H3)
(H4)
(H5)
(H6)
则有如下结果.
命题3.1 模型(1.4) 的非负常数平衡解的存在性如下
(i) 若(H1) 成立, 则模型(1.4) 有两个正常数平衡解:
且
(ii) 若(H2) 成立, 则模型(1.4) 有唯一的正常数平衡解
(iii) 若(H3) 成立, 则
(iv) 若(H4) 成立, 则模型(1.4) 有两个半平凡常数平衡解:
(v) 若(H5) 成立, 则模型(1.4) 有唯一的半平凡常数平衡解
(vi) 若(H6) 成立, 则
记
定理3.1 (i) 假设
(ii) 若
(iii)
下面分别利用Lyapunov函数和上下解两种方法证明常数平衡解
定理3.2 假设
证 令
其中
由复合函数求导法则可得
其中
并且
由假设条件
时
证毕.
利用上下解方法可以优化定理3.2的结果.
定理3.3 若
证 因为
从
由抛物方程比较原理, 存在
对
对
于是存在
由(3.1) 式中选取的
于是存在
并且
由文献[26] 中上下解定义可知, (3.2) 式表明
成立. 定义两个迭代序列
其中
(3.3) 式简化为
(3.4) 式中第二式减去第一式可得
假设
(3.6) 式代入(3.4)式可得
于是方程
有两个正根
因为
证毕.
注3.1 从定理3.2和3.3可以看出, 在研究正常数平衡解
下面给出一个数值模拟的例子.
例3.1 在模型(1.4) 中令
图 1
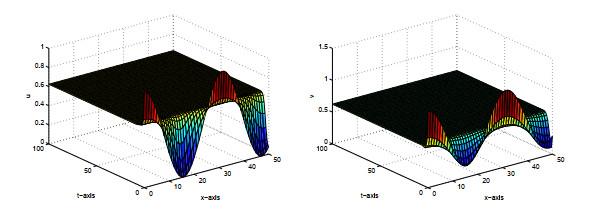
图 1
当
4 稳态模式–(1.4) 的非常数正稳态解
本节利用Leray-Schauder度理论研究如下稳态系统
的非常数正解的存在性和不存在性.
4.1 系统(4.1) 正解的估计
本小节给出正解的上下界的先验估计. 首先列出如下的已知结果.
命题4.1(最大值原理[27]) 令
记
记
命题4.2(Harnack不等式[28]) 令
利用命题4.1和4.2可得如下结果.
定理4.1(上界) 系统(4.1) 的任意正解
证 系统(4.1) 的第一个方程使用命题4.1可得(4.2) 式中的第一个不等式. 因为
定理4.2(下界) 记
证 令
由命题4.1可得
故而
由(4.5) 式可知
这一估计意味着
定义
则
命题4.2表明
其中
这时有
由(4.4)式可得
4.2 系统(4.1) 非常数正解的不存在性
定理4.3 存在一个常数
证 令
系统(4.1) 中的方程
取
因此有
由定理4.2可知
类似于上面的分析可得
由上面的估计可知, 对某正常数
利用Poincaré 不等式, 存在一个常数
故而, 当
4.3 系统(4.1) 非常数正解的存在性
令
其中
并且
利用不动点指数计算公式[29]
其中
直接计算可得
其中
如果
情况I 假设(H1) 成立.
在这种情况下, 系统(4.1) 有两个正常数解
定理4.4 假设
证 易得
定理4.3可知存在
下面将证明对任意
对这些固定的
并且考虑如下问题
显然, 对
由前面分析可知问题的关键是确定
计算可得
利用不动点指数计算公式有
由定理4.1和4.2可知, 系统(4.1) 的任何正解必属于
由假设,
如果
这与(4.9) 式矛盾.证毕.
情况II 假设(H2) 成立.
在这种情况下, 系统(4.1) 有唯一正常数解
定理4.5 假设
情况III 假设(H3) 成立.
在这种情况下, 系统(4.1) 有唯一正常数解
定理4.6 假设对某
上面两个定理的证明和定理4.4类似, 这里不再证明.
下面利用Fourier谱方法[30]进行数值模拟.
例4.1 在模型(1.4)中, 令
图 2
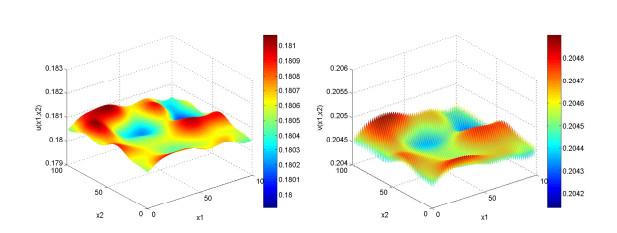
图 2
当
图 3

图 3
当
5 结论
本文研究了食饵具有Michaelis-Menten型收获的Leslie-Gower捕食-食饵模型的动力学性质和稳态模式. 通过适当尺度变换, 原来的Michaelis-Menten收获项变为一个仅有两个参数(
研究结果表明: 如果收获系数较低(即
一方面, 在没有扩散的情况下模型(1.4) 退化为常微分模型(1.2), 其中
参考文献
The orgins and evolution of predator-prey theory
Limit cycles in predator-prey communities
DOI:10.1126/science.177.4052.900 [本文引用: 1]
The bifurcation structure of the Holling-Tanner model for predator-prey interactions using two-timing
非局部扩散Holling-Tanner捕食者-食饵系统的临界与非临界行波解分析
DOI:10.3969/j.issn.1003-3998.2021.06.011
Analysis on critical waves and non-critical waves for Holling-Tanner predator-prey system with nonlocal diffusion
DOI:10.3969/j.issn.1003-3998.2021.06.011
Bifurcation and spatio-temporal patterns in a diffusive predator-prey system
DOI:10.1016/j.nonrwa.2018.01.011
Bifurcations in a discrete predator-prey model with nonmonotonic functional response
DOI:10.1016/j.jmaa.2018.03.074
Global bifurcation analysis and pattern formation in homogeneous diffusive predator-prey systems
时滞在具有Ivlev型功能反应函数的捕食者-食饵扩散系统中的作用
The effect of delay on a diffusive predator-prey system with Ivlev-type functional response
A diffusive predator-prey model in heterogeneous environment
DOI:10.1016/j.jde.2004.05.010 [本文引用: 4]
The properties of a stochastic model for the predator-prey type of interaction between two species
DOI:10.1093/biomet/47.3-4.219 [本文引用: 1]
Global stability for a class of predator-prey systems
DOI:10.1137/S0036139993253201 [本文引用: 2]
Bifurcations of a ratio-dependent predator-prey system with constant rate harvesting
DOI:10.1137/S0036139903428719 [本文引用: 1]
Bifurcations of invariant tori in predator-prey models with seasonal prey harvesting
DOI:10.1137/120895858 [本文引用: 1]
Management of multispecies fisheries
DOI:10.1126/science.205.4403.267 [本文引用: 1]
Bifurcation analysis in a predator-prey model with constant-yield predator harvesting
Maximum sustainable yields in systems subject to harvesting at more than one trophic level
DOI:10.1016/0025-5564(80)90103-0 [本文引用: 1]
Harvesting from a prey-predator complex
DOI:10.1016/0304-3800(82)90016-3 [本文引用: 2]
Bogdanov-Takens bifurcation in a Leslie-Gower predator-prey model with prey harvesting
DOI:10.1007/s10255-014-0279-x [本文引用: 1]
Phase portraits, Hopf-bifurcations and limit cycles of Leslie-Gower predator-prey systems with harvesting rates
Bifurcation analysis and control of Leslie-Gower predator-prey model with Michaelis-Menten type prey-harvesting
DOI:10.1007/s12591-012-0142-6 [本文引用: 5]
Regulation of a prey-predator fishery by taxation: a dynamic reaction model
DOI:10.1142/S0218339003000828 [本文引用: 1]
Aggregation and fishery dynamics: a theoretical study of schooling and the purse seine tuna fisheries
Nonlinear Parabolic and Elliptic Equations
Diffusion, self-diffusion and cross-diffusion
DOI:10.1006/jdeq.1996.0157 [本文引用: 1]
Large amplitude stationary solutions to a chemotais systems
DOI:10.1016/0022-0396(88)90147-7 [本文引用: 1]
Topics in Nonlinear Functional Analysis

{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}