

1 引言
本文考虑如下广义绝对值方程组(GAVE)
其中
AVE (1.2)也是另外两类GAVE
和
的特例.当
对于AVE (1.2)和GAVE (1.3), 目前已有许多理论和算法方面的研究工作, 例如文献[8, 10, 12]等探究了方程(1.2)和(1.3)解的存在性及唯一性的充分或必要条件; 文献[3, 4, 9]及其中的参考文献建立了求解方程(1.2)和(1.3)的各类数值方法.但是, 对于GAVE (1.1)和(1.4)的研究还比较匮乏.据笔者所知, Wu[14]首次研究了GAVE (1.4)解的存在唯一性条件, 而且文献[14]的结果可以被推广用来确定GAVE (1.1)的解的性质.然而, 目前还没有求解GAVE (1.1)的动力学模型.为此, 本文提出了求解GAVE (1.1)的动力学模型, 分析了所提出的模型的稳定性, 并用数值实验验证了模型的可行性和有效性.
本文余下部分组织如下:第2节陈述一些预备知识; 第3节提出了一个动力学模型来求解GAVE (1.1);第4节对动力学模型解的存在性和平衡点的稳定性进行分析; 第5节给出一个数值算例; 第6节对本文的研究内容做了简要总结.
2 预备知识
本节给出本文所需的一些预备知识.
定义2.1[2] 矩阵
注2.1 显然, 正定矩阵是
定义2.2[6] 给定向量值函数
引理2.1[15] 设
当
推广文献[14]中的定理3.2, 可得如下引理.
引理2.2 假设
在后续的稳定性分析中需要使用以下投影映射的性质.
引理2.3[7] 设
其中
以下定理陈述了GAVE (1.1)和广义线性互补问题(GLCP)之间的关系, 这为后续动力学模型的建立奠定了基础.它的证明受文献[14]的启发.
定理2.1 GAVE (1.1)等价于以下GLCP:
证 方程(1.1)可以表示成
则
从而由引理2.1, 定理得证.
本节最后根据文献[6]介绍自治动力系统的一些基本概念和理论.自治动力系统可表示为
其中,
定义2.3 若
定义2.4 设
则称系统(2.2)的平衡点
定义2.5 若动力系统(2.2)的平衡点
则称系统(2.2)的平衡点
对于动力系统(2.2), 有如下解的存在性定理.
定理2.2 假设
在结束本节前, 给出判定动力系统(2.2)的平衡点的稳定性判定定理.
定理2.3 设
则
则
定理2.4 设
则
3 动力学模型
本节, 在Chen等人工作[3]的基础上, 提出求解GAVE (1.1)的一个动力学模型.
类似文献[3], 可以证明
其中
定理3.1
基于定理3.1, 提出以下求解GAVE (1.1)的动力学模型
其中
显然, 当
定理3.2 假设
4 理论分析
本节分析动力学模型(3.4)解的存在性及其平衡点的稳定性.
为了证明解的存在性, 给出如下引理.
引理4.1 由(3.4)式所定义的函数
证 对
即得函数
由定理2.1和引理4.1可得如下解的存在性定理.
定理4.1 给定初始值
分析动力学模型(3.4)的稳定性, 需要如下定理, 它的证明受到文献[5, 定理2]的启发.
定理4.2 设
证 由于
令
由
利用前面得到的两个不等式和
可以得到
从而
将(2.1)式的
因为
定理证毕.
注4.1 若
现在, 可以分析动力学模型(3.4)的稳定性.具体地, 有如下定理.
定理4.3 假设
证 由定理4.1可知, 对于任意
易知
则由定理2.3可知
当
5 数值实验
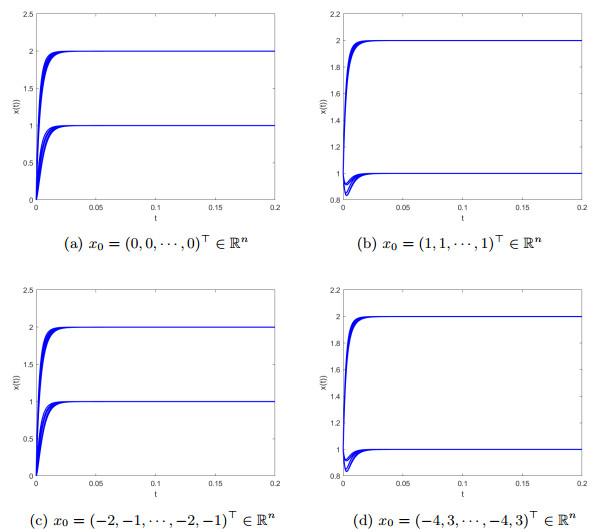
本节给出一个数值例子说明所提出的算法的有效性.算法通过MATLAB R2014b编程实现.在数值模拟的过程中, 使用MATLAB内置函数"ode45"对常微分方程(3.4)进行求解.
例5.1 对文献[1]中的例5.1进行转化, 可以得到GAVE (1.1)的系数矩阵和向量如下
其中
据此,
图 1
6 结论
本文建立了求解一类新的广义绝对值方程组的动力学模型, 在适当的条件下证明了该动力学模型解的存在性并且构造了Lyapunov函数给出了所提出的动力学模型(3.4)全局稳定的充分条件.数值实验验证了所提出的动力学模型是可行且有效的.本文所研究的新的广义绝对值方程组与线性互补问题等价[14], 因此对此类新的广义绝对值方程组的数值算法的继续研究具有重要意义.
参考文献
Modulus-based matrix splitting iteration methods for linear complementarity problems
An inverse-free dynamical system for solving the absolute value equations
DOI:10.1016/j.apnum.2021.06.002 [本文引用: 4]
Analysis and application of a one-layer neural network for solving horizontal linear complementarity problems
DOI:10.1080/18756891.2013.858903 [本文引用: 1]
Inexact implicit methods for monotone general variational inequalities
DOI:10.1007/s101070050086 [本文引用: 1]
Absolute value programming
DOI:10.1007/s10589-006-0395-5 [本文引用: 2]
A dynamic model to solve the absolute value equation
DOI:10.1016/j.cam.2017.09.032 [本文引用: 1]
Absolute value equations
On equivalent reformulations for absolute value equations
DOI:10.1007/s10589-007-9158-1 [本文引用: 1]
A theorem of the alternatives for the equation Ax+B|x|=b
DOI:10.1080/0308108042000220686 [本文引用: 1]
Systems of linear interval equations
DOI:10.1016/0024-3795(89)90004-9 [本文引用: 1]
The unique solution of a class of the new generalized absolute value equation
A class of new modulus-based matrix splitting methods for linear complementarity problem
DOI:10.1007/s11590-021-01781-6 [本文引用: 1]

{kind=link}
{kind=link}