

1 引言
连续时间齐次马尔可夫链在我国得到了系统深入的研究, 参见文献[4, 15, 22, 26, 33], 并且已经广泛应用于各个领域, 包括生物、工程、经济管理、社会管理等, 例如, 离子通道的马尔可夫链模型、商品折旧率的马尔可夫链模型、受马尔可夫链调控的风险模型[1]等.现实系统中, 潜在的马尔可夫链(例如调控风险模型的潜在马尔可夫链)的转移速率(或概率)是怎样的?可能恰恰就是首先要通过少数状态观测的数据来确认的, 例如, 确定由连续时间马尔可夫链建模的离子通道的门控动力学就是这种实际应用于生物物理学的典型例子, 参见文献[5]及进一步的文献.因此, 如何利用部分可观测数据确认潜在的马尔可夫链的转移速率矩阵在实际应用中起着非常重要的作用, 称为马尔可夫链的统计确认问题.
由给定的转移速率矩阵推导出在某一状态或几个状态下的击中时间的概率密度函数是相对容易的.然而, 使用这些概率密度函数反过来(或逆过程, 或反演)确认潜在的转移速率矩阵是非常困难的, 这是由概率密度函数产生的复杂性(由转移速率经过复杂的运算而产生)造成的.文献[7]提供了一个由观测数据获得转移速率矩阵的办法, 即找出偏差矩阵的Drazin逆, 但它要知道每个状态的平均击中时间.显然, 在实际应用中, 要获得全部状态的击中时间分布是不可能的.因此, 确认问题通常使用极大似然估计方法, 见文献[5, 21, 25, 28, 32]等.此外, 文献[8]开始了探索利用整数集上简单马尔可夫链和两个子集的首次击中时和首次击中位置的联合分布来确定的D-perturbation马尔可夫链的转移概率.
一般来说, 作为有限状态的可逆马尔可夫链模型, 只有两类拓扑(有环和无环).文献[9, 27-28]提出了生灭链、星形链、星形分枝链等基本的(无环)模型的统计确认方法:生灭链可由任意一个反射壁的观测确认、星形链可由其中心状态的观测确认、星形分枝链可由各分枝的末端(叶子)状态的观测确认.最近, 又解决了更一般的树形马尔可夫链的统计确认问题[32]:可由所有叶子状态的观测确认; 因为无环的结构类形都属于树形, 因而是一个重要的类型.马尔可夫链统计确认的一个关键问题是找出更一般类型的可行的解决办法并提出建议的算法.因此, 本文将借助禁忌速率探讨最重要并且最关键的另一类型, 即有环(至少包含一个环)的可逆马尔可夫链.得到了确认其转移速率矩阵的必要条件(包括环形的充分必要条件), 以及关于其充分性的一般结论:有环可逆马尔可夫链的转移速率矩阵可以通过所有叶子状态和每个子环中任何两个相邻状态的击中时分布来计算得到; 给出了精确计算各转移速率的算法, 并通过数例验证了算法的正确性.随着无环和有环的可逆马尔可夫链的统计确认问题可以由此方法计算解决, 标志着马尔可夫链的统计确认问题在可逆性条件下已经形成了较为系统的理论和较为成熟的计算.
2 主要结果
定理2.1 对于一般的有限状态空间上的连续时间可逆有环马尔可夫链, 如下结论成立.
(Ⅰ)所有叶子状态的观测是确认无环子图的充分条件, 也是首选的有效方法.
(Ⅱ)两相邻状态的观测是确认一个环或子环的必要条件, 也是非常关键的打开环的方法; 如果它有
定理2.2(充分条件) 对于一般的有限状态空间上的连续时间可逆有环马尔可夫链, 其转移速率矩阵可以通过所有叶子状态和每个环中的任何两相邻状态的观测来确认.
推论2.1(充分必要条件) 对于有限状态空间上的连续时间环形可逆马尔可夫链, 两个相邻状态的观测是确认其转移速率矩阵的充分必要条件.
3 背景和预备知识
为方便起见, diag
设
记
如果不特别说明, 本文所说的马尔可夫链通常指有限状态空间上的连续时间可逆马尔可夫链, 且其初始分布是其平稳分布.
设
相应地, 其平稳分布为
3.1 击中时分布
因为需要, 先回顾一下有关聚合马尔可夫链的基本结果.
为了记号简便, 令
引理3.1
其中
推论3.1 单个状态
3.2 击中分布与转移速率矩阵的微分关系
对
则
引理3.2 设单个状态
击中时分布在零时刻的各阶微分与Q矩阵之间的关系可得一类非常重要的约束关系.
引理3.3 基于观测
右式虽表达简洁, 但无法直接呈现其实际的构成, 因此, 还需借助禁忌速率进行深入剖析.
对于
为从状态
为了更好的理解后续的求解过程, 进一步探索
对于给定的
令
性质3.1 令
在后面的求解过程中, 每个公式中粗体字的量可能是其中的一个新的未知量.
推论3.2
特别地, 若
推论3.3 如果单个状态
右边第一个方程就是状态
上述可能的转移解码了
最后, 适当放宽[32]中有关可确定性的条件(主要考虑完全树或状态数很少的特殊的环的情形), 对马氏链的统计确认施加了一个相对温和的限制条件, 即所观测的状态数至多比整个链状态数的一半多一个时, 从马尔可夫链统计确认的意义上来说, 称为可确定的.
4 定理2.1的证明
定理2.1(Ⅰ)来自树形马尔可夫链的统计确认理论[32]:可由所有叶子状态的观测确认.
关于定理2.1(Ⅱ).首先, 根据生灭链[9]及后续的研究, 如果只观测一个不是反射壁的状态时, 它是无法确定该生灭链的, 从而更无法确定一个环形链或子环.因此, 要确定一个环形链, 至少需要观测两个状态, 而且, 如果两个状态不相邻的话, 也无法确定该环形链, 即使观测链中一半的互不相邻的状态, 也无法确定; 例如, 环中共有
同理, 如果一个链中有
图 5
因此, 定理2.1成立.
5 环形链:推论2.1的证明
环形链是指由仅仅只有一个环的链.给定一个有限状态空间
与对应的生灭链相比, 其中只是多了
引理5.1 对于
下面的引理可由推论3.3得出.
引理5.2 接下来的方程对任意的
其中对于
(5.8)式或(5.9)式的右边表明仅有黑体部分的两个可能是较前一阶导数新增的未知量.然而, 在后续通过确定的两相邻状态的观测来求解的过程中, 每个方程都只有一个新的未知速率, 具体地说, 当观测两个相邻状态中较小(相应地, 较大)的状态时, 只有第一个(相应地, 第二个)黑体是未知量;例如, 如果观测状态为
推论2.1的证明 由定理2.1(Ⅰ), 要证明推论2.1, 只需要证明两相邻状态的观测也是充分条件即可, 即证明:对于环形链, 由其中任意两相邻状态的观测可确认全部转移速率.
不失一般性, 设
首先, 环是可打开的.根据(5.3)式, 对于
其次, 当
进一步, 当
这意味着当
最后, 可用数学归纳法来证明该推论, 这里省略繁琐的证明细节.因此, 两相邻状态的观测是确认一个环形链的充分必要条件, 即先通过任意两个相邻状态的观测打开环, 然后前后(向左和向右)依次确认其余的转移速率, 这也是有环链的统计确认的一个关键思想.
算法5.1 环形链.
1) 打开环:根据证明中的第一部分可以计算出
2) 根据(5.4)和(5.5)式, 向左计算出
3) 根据(5.10)式, 向左计算出
4) 根据(5.11)式, 向左计算出
5) 重复步骤3)和步骤4):对于
6 定理2.2的证明
本文说单环链是指由一个环和其他无环的子图组成的链;有环的链是指至少有一个环的链.不失一般性, 考虑具有代表性的单环链(环形链是特例)和双环链.解决了这些代表性的有环链的统计确认, 对于一般的有环的马尔可夫链, 只当作是它们的组合, 也就自然证明了定理2.2是成立的.
6.1 单环链
图 1
根据线性子图的结果, 通过状态
定理6.1 对于图 1中的马尔可夫链, 可以通过叶子状态和环中任意两相邻状态的观测确认.
证明很简单.相应的算法就是先直接根据文献[9]中生灭连的算法计算出线性子图的转移速率, 然后根据算法5.1计算子环中的其它转移速率.实际上, 还可以给出一个更优的结论.
定理6.2 对于图 1中的马尔可夫链, 它可以通过环中任意两相邻状态(除了度数为
证 根据环形链统计确认的基本思想, 观测距离节点度数为
该证明与环形链的证明思路几乎是一样的, 主要变化是关于
第二, 当
第三, 当
其中
其中
通过比较(5.8)–(5.9)式与(6.1)–(6.2)式, 可以发现主要变化是
其中
其中
注意到以上方程中, 禁忌集合
这表明可以通过从
最后, 返回到(6.1)和(6.2)式中的
注6.1 如果两相邻状态包含了图中唯一的度数为
算法6.1 由一个环和一条直线组成的单环链.
1) 根据算法5.1, 打开环并确认出状态
2) 对于
3) 对于
4) 重复步骤2)和步骤3):计算出状态
5) 对于
6) 重复步骤5):在
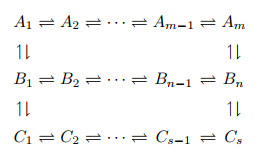
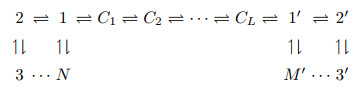
接下来, 对含有多条直线的单环链, 例如图 2, 当所有叶子状态可观测时, 可以确定所有直线上的转移速率.于是可得如下结论.
图 2
定理6.3 对于图 2中含有多条直线的单环链, 每个链都可以通过所有叶子状态以及环形中任意两相邻状态的观测确认.
图 3
定理6.4 对于由一个树形和环形组成的单环链, 可以通过树中所有叶子状态和环中任何两相邻状态的观测来确认.
算法6.2 树和环组成的单环链.
1) 由文献[32]中树形链的确认算法, 通过观测所有叶子可以确认出整个树形部分转移速率;
2) 类似于一条直线的单环链的确认算法, 通过观察环中的任何两相邻状态就可以计算子环中的所有转移速率.
注6.2 不是所有叶子状态都需要观测.理论上, 当所有的叶子中只有一个是不可能观测时, 它也是可确认的.然而, 对所有叶子的观测应该是最优的, 这样可以最小化误差传播. \label{remark-cycle-tree}
6.2 双环链
作为含有多个环的有环链的代表, 首先论证两个环通过一条直线连接的有环链.
图 4由两个环通过一条直线连接的有环链的示意图.如前所述, 需要分别观测左环中的两相邻状态和右环中的另两相邻状态分割打开两个环.因此, 可以得出下面的通过最少的状态观测的结论.
图 4
定理6.5 对于图 4中的双环链, 它可以通过左环中的任何两相邻状态和右环中的任何两相邻状态的观测来确认.
证 关键的方法是将两个环分别打开.正如由一条直线的单环链的统计确认理论中所述, 两相邻状态距离节点度数为
先考虑左边的子环.类似于前述的环形链的情况, 满足条件
类似于前面小节中的一条直线的单环链, 可以很容易地打开左边的子环, 然后确定状态
再继续通过观测右环的任何两相邻状态来确认其转移速率.
注6.3 以上两个子环中存在两个节点度数为
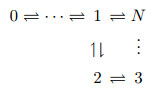
然后, 考虑一个更复杂的情形, 即两个环共一条边的双环链, 如图 5.
定理6.6 对于图 5所示有公共边的双环链, 它可以通过上面环中的任意两相邻状态和下面环中的任意两相邻状态(即
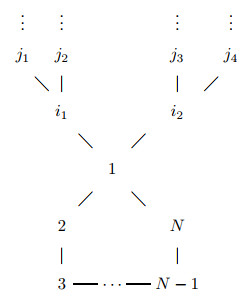
7 数例
为了证明该算法的正确性和该方法的统计意义, 本文给出了一个数例.正如前面所述, 本文主要集中在求解的最后一步, 且假定已经很好的拟合出了每个需要观测的状态的逗留时和击中时的概率密度函数.
设
图 6

下面将证明该
按照算法6.2, 它们可由状态
本文把计算分为两步:拟合出必要的击中时和逗留时的概率密度函数, 这里省去.并由此计算得到相应的
第二步 计算出转移速率.
首先, 由
而且, 可计算出关于状态
同理可得其它状态的.
因此, 由算法6.2, 可得
于是有
接下来, 由
相似地, 由
再由
最后, 由
再由
故, 由上可得
至此, 所有转移速率都求出来了.
不难发现该方法是正确的, 而且是非常有效的.
8 结束语
本文完成了有环的可逆马尔可夫链的统计确认问题, 这也是最重要和最关键的一类马尔可夫链.结论是:有环的可逆马尔可夫链是可通过马尔可夫链反演法来确定的.随着本文的有环链和之前的无环链的确定, 可逆马尔可夫链的统计确认已经形成了系统的理论和成熟的算法.为了进一步完善该理论并拓展应用范围, 未来将探索有着更广泛应用的不可逆马尔可夫链的统计确认问题, 尽管这可能非常困难.
参考文献
On the discounted penalty function in a Markov-dependent risk model
Communications:can one identify nonequilibrium in a three-state system by analyzing two-state trajectories?
Marked continuous-time markov chain modelling of burst behaviour for single ion channels
On the stochastic properties of bursts of single ion channels opening and of clusters of brusts
The quality of maximum likelihood estimates of ion channel rate constants
The deviation matrix of a continuous-time Markov chain
Hitting time and inverse problems for Markov chains
Identifying transition rates of ionic channel via observation of a single state
Utilizing the information content in two-state trajectories
Toolbox for analyzing finite two-state trajectories
On aggregated Markov processes
Software for acquisition and analysis of ion channel data:choices, tasks, and strategies
Estimating kinetic constants from single channel data
A second perspective on the Amann-Schmiedl-Seifert criterion for nonequilibrium in a three-state system
Modelling losses with the mixed exponential distribution
A canonical representation for aggregated Markov processes
Linking exponential components to kinetic states in markov models for single-channel gating
Estimating transition rates in aggregated Markov models of ion channel gating with loops and with nearly equal dwell times
Identifying transition rates of ionic channel of star-graph branch type
Markov chain inversion approach to identify the transition rates of ion channels
Taboo rate and hitting time distribution of continuous-time reversible Markov chains
确定一类带环离子通道门控的转移速率
Identifying transition rates for a type of gating schemes of ion channels with loops
确定环形Markov链的Q-矩阵
Identifying Q-matrix of cyclic Markov chain
Statistical identification of Markov chain on trees
DOI:10.1155/2036248 [本文引用: 13]

{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}