

1 引言
众所周知,大多数反问题的计算是基于相应正问题的计算.由于反问题的病态性,特别是数值计算的不稳定性,正问题的高精度计算显得尤为重要.有限差分法是数值求解偏微分方程的经典方法.与其他类型的数值方法如有限元法相比较,有限差分法无法适应复杂的区域.但是,有限差分法也有其优点,例如计算格式构造简单,并且容易计算机编程.
本文中,我们考虑以下反初值问题
其中
这里
的初值反演问题,利用对数凸性方法证明了解的条件稳定性,并通过Landweber迭代得到了稳定的数值解.
为了加速收敛,本文采用共轭梯度法来求解数值解.然而,对于二阶退化抛物型方程来说,要提高计算精度似乎并不容易.
Crank-Nicolson方法(CN)是一种广泛应用于抛物型方程的数值方法,其精度为二阶.将CN方法应用于初边值问题,例如,以下非退化模型
其中,
如果我们仍然将中心差商应用于方程(1.5)-(1.6),则不能消除虚拟点,因为系数
本文采用一种新的且相当简单的方法来处理方程(1.5)-(1.6),从而得到二阶精度的差分格式,并证明该格式的稳定性和收敛性,这也是本文的主要贡献.
本文的主要结构如下:在第2节中,提出了一种新的二阶精度差分法,并证明了该方法的稳定性和收敛性.在第3节中,将反问题简化为算子方程,并在共轭梯度法的基础上设计了一种数值算法来求解问题.最后一节,给出了一些典型的数值算例来说明反演算法的有效性.
2 正问题的有限差分法
将区域
网格点
记号
本文引入以下记号
和一些模
其中,
通过有限体积法[9],我们可得方程(1.1)的CN格式
其中,
本文假设
来近似方程(1.5)-(1.6).容易看出, (2.2)和(2.3)式的截断误差是
方程(1.1)的初始条件可以离散为
引理2.1 假设
这里,
证 在方程(2.1)两边同时乘
由(2.5)式右端的第一项,我们可知
结合(2.5)式、(2.6)式以及柯西不等式可得
在方程(2.2)的两边同时乘
对方程(2.3)做类似的处理,有
由(2.7)-(2.9)式,我们可以得到
由
其中,
由(2.10)式、(2.11)式以及(2.12)式可知
将(2.13)式右端的第三项和第四项分别用
注意到
这里,
利用
因此, (2.17)式有如下估计
这里用到了如下不等式
对
其中
对于方程(2.13)右端的最后两项,我们可以得到
其中
结合(2.13), (2.19), (2.21)和(2.22)式,可知
在实际计算过程中,参数
然后,可以将(2.23)式改写为
因此,如果
由(2.25)和(2.26)式,我们可知
利用离散Gronwall不等式[12],可以得到
引理2.1证明完毕.
现在,我们讨论差分格式的收敛性.设
可以很容易地看出,
值得注意的是
通过引理2.1,我们可以得到
3 反问题的迭代算法
目前存在许多有效的正则化方法,例如Tikhonov正则化方法或Landweber迭代,它们都可用于反问题(1.1)的求解.然而, Tikhonov正则化方法需要求解抽象算子方程的逆算子,这通常是很困难的. Landweber迭代可以避免这一困难,但其收敛速度非常慢.所以,本文采用共轭梯度法(CGM) (参见文献[5])来处理我们的反问题.
定义下列算子
其中,
将函数
函数
其中
因此,基于上述的分析,我们在本节始终假设
引理3.1 对于任意
引理3.1的证明见文献[16].
假设“真解”
而且观测噪声水平
迭代算法的过程可以表述为如下步骤.
Step 1 令
Step 2 求解初边值问题(1.1),得到解
Step 3 确定残差
然后,求解共轭方程
得到解
Step 4 计算
其中
Step 5 求解以下方程
得到解
并令
Step 6 令
终止迭代步骤如下.
设
4 数值结果
首先,我们检验差分格式对第二节中正问题的有效性.
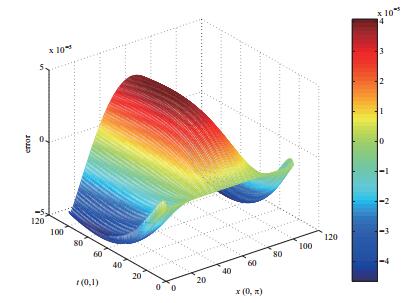
我们先考虑以下方程
其中
图 1
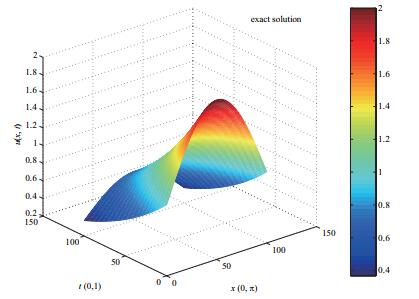
图 2
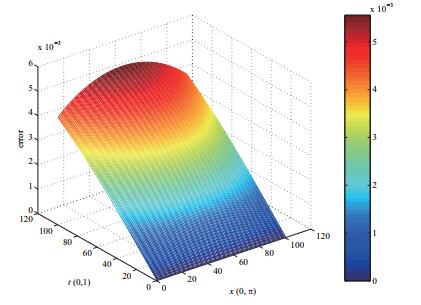
其后,我们考虑文献[16]中所提出的差分格式
其截断误差为
图 3
接下来,我们转而进行反问题的数值模拟.我们做了两个数值算例来检验迭代算法的稳定性.在所有算例中,基本参数选取为
并且假设扩散系数
算例1 第一个算例中,我们取
附加条件
图 4展示了引入噪声数据下的重构结果.当
图 4
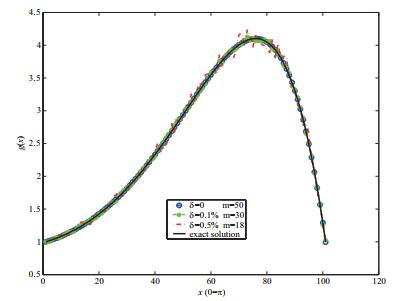
算例2 在第二个数值实验中,我们试图重构一个较复杂的函数
该函数是连续阶跃函数.这里的
图 5
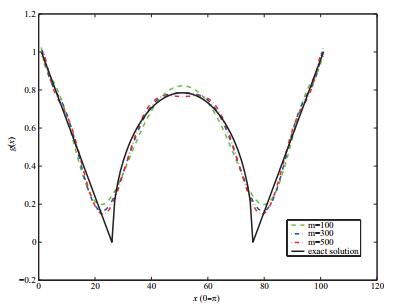
虽然该函数是连续函数,但很明显它在一些点是不可微的.这些不可微点在数学中称为尖点.可以看出,该函数的两个连接点
该算法效果良好,只需要100次迭代,就可以达到令人满意的收敛结果.如果继续增加迭代次数,那么数值曲线会更加接近尖点.需说明一下, 500次迭代并不算太多.事实上,如果采用Landweber迭代[16],为了达到同样的效果,所需的迭代次数约为当前算法的10倍.
参考文献
The linearized Crocco equation
DOI:10.1007/s00021-005-0186-2 [本文引用: 1]
Null controllability of degenerate heat equations
A quasi Tikhonov regularization for a two-dimensional backward heat problem by a fundamental solution
DOI:10.1088/0266-5611/24/6/065012 [本文引用: 1]
An inverse problem of identifying the source coefficient in a degenerate heat equation
DOI:10.1080/17415977.2014.922079 [本文引用: 1]
Determination of a spacewise dependent heat source
DOI:10.1016/j.cam.2006.10.026 [本文引用: 1]
A variational method for identifying a spacewise-dependent heat source
A procedure for determining a spacewise dependent heat source and the initial temperature
DOI:10.1080/00036810701858193 [本文引用: 1]
Numerical simulation for an inverse source problem in a degenerate parabolic equation
DOI:10.1016/j.apm.2015.03.016 [本文引用: 1]
Determination of the insolation function in the nonlinear Sellers climate model
DOI:10.1016/j.anihpc.2012.03.003 [本文引用: 1]
Optimization method for the inverse problem of reconstructing the source term in a parabolic equation
DOI:10.1016/j.matcom.2009.06.031 [本文引用: 1]
Inverse problem of time-dependent heat sources numerical reconstruction
An inverse backward problem for degenerate parabolic equations
DOI:10.1002/num.22165 [本文引用: 6]

{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}