Acta mathematica scientia,Series A ›› 2021, Vol. 41 ›› Issue (4): 1111-1123.
Previous Articles Next Articles
Containment Control for Partial Differential Multi-Agent Systems via Iterative Learning Algorithm
Dan Zhang,Qin Fu*( ),Zhenjie Chen
),Zhenjie Chen
- School of Mathematical Sciences, Suzhou University of Science and Technology, Jiangsu Suzhou 215009
-
Received:2020-08-27Online:2021-08-26Published:2021-08-09 -
Contact:Qin Fu E-mail:fuqin925@sina.com -
Supported by:the NSFC(11971343)
CLC Number:
- TP13
Cite this article
Dan Zhang,Qin Fu,Zhenjie Chen. Containment Control for Partial Differential Multi-Agent Systems via Iterative Learning Algorithm[J].Acta mathematica scientia,Series A, 2021, 41(4): 1111-1123.
share this article

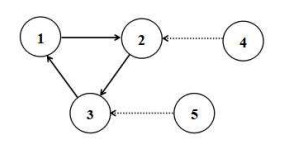
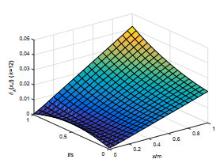
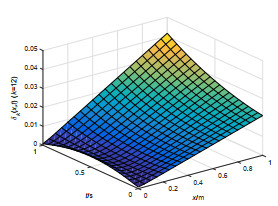
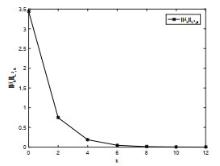
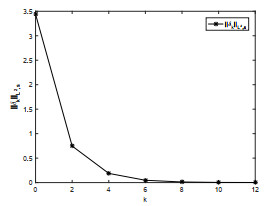
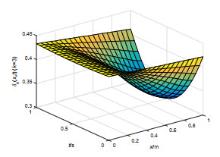
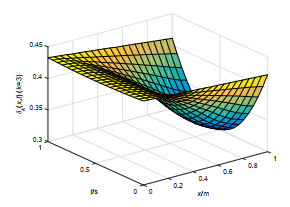
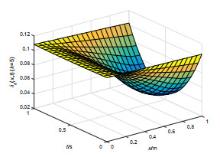
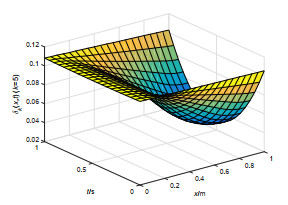
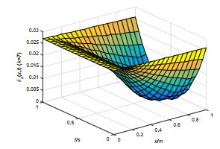
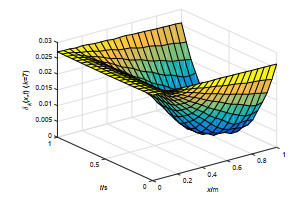
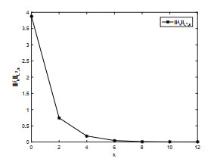
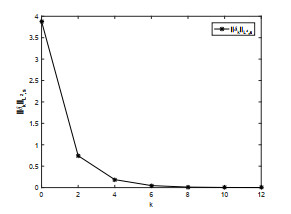
Fig.1
"
"

"
"
"
"
"
"
"
| 1 |
Fang C , Zhou Z Y , Zhao P , Lin Z C . Feature learning via partial differential equation with applications to face recognition. Pattern Recognition, 2017, 69, 14- 25
doi: 10.1016/j.patcog.2017.03.034 |
| 2 |
Acevedo J I , Lelievre T . A nonlinear approximation method for solving high dimensional partial differential equations: Application in finance. Mathematics and Computers in Simulation, 2018, 143, 14- 34
doi: 10.1016/j.matcom.2016.07.013 |
| 3 |
Tian C , Chang K C , Chen J S . Application of hyperbolic partial differential equations in global optimal scheduling of UAV. Alexandria Engineering Journal, 2020, 59 (4): 2283- 2289
doi: 10.1016/j.aej.2020.02.013 |
| 4 | 樊晓平, 徐建闽, 周其节, 梁天培. 柔性机器人的动力学建模及控制. 控制理论与应用, 1997, 14 (3): 318- 335 |
| Fan X P , Xu J M , Zhou Q J , Liang T P . Dynamic modeling and control of flexible robotic manipulators. Control Theory and Applications, 1997, 14 (3): 318- 335 | |
| 5 | Selvadurai A P S . Partial Differential Equations in Mechanics 1:Fundamentals, Laplace's Equation, Diffusion Equations, Wave Equations. Berlin: Springer, 2000 |
| 6 | Lapidus L , Pinder G F . Numerical Solution of Partial Differential Equations in Science and Engineering. New York: John Wiley & Sons Inc, 1982 |
| 7 |
Arimoto S , Kawamura S , Miyazaki F . Bettering operation of robots by learning. Journal of Robotic Systems, 1984, 1 (2): 123- 140
doi: 10.1002/rob.4620010203 |
| 8 |
Dai X S , Tian S P , Peng Y J , Luo W G . Closed-loop P-type iterative learning control of uncertain linear distributed parameter systems. IEEE/CAA Journal of Automatica Sinica, 2014, 1 (3): 267- 273
doi: 10.1109/JAS.2014.7004684 |
| 9 | 傅勤. 非正则分布参数系统的迭代学习控制. 控制与决策, 2016, 31 (1): 114- 122 |
| Fu Q . Iterative learning control for irregular distributed parameter systems. Control and Decision, 2016, 31 (1): 114- 122 | |
| 10 |
Meryem H , Cheng S , Samia H . A PD-type iterative learning control algorithm for one-dimension linear wave equation. International Journal of Control, Automation and Systems, 2020, 18 (4): 1045- 1052
doi: 10.1007/s12555-019-0094-5 |
| 11 |
Fu Q , Gu P P , Wu J R . Iterative learning control for one-dimensional fourth order distributed parameter systems. Science China Information Sciences, 2017, 60 (1): 012204
doi: 10.1007/s11432-015-1031-6 |
| 12 |
Gao R , Huang J S , Wang L . Leaderless consensus control of uncertain multi-agent systems with sensor and actuator attacks. Information Sciences, 2019, 505, 144- 156
doi: 10.1016/j.ins.2019.07.075 |
| 13 |
Liu Y , Hou X H . Event-triggered consensus control of disturbed multi-agent systems using output feedback. ISA Transactions, 2019, 91, 166- 173
doi: 10.1016/j.isatra.2019.02.004 |
| 14 |
Han J , Zhang H G , Jiang H , Sun X .   |
| 15 |
Gao J F , Zheng M N . Distributed adaptive event-triggered protocol for tracking control of leader-following multi-agent systems. Journal of the Franklin Institute, 2019, 356 (17): 10466- 10479
doi: 10.1016/j.jfranklin.2018.07.019 |
| 16 |
Jenabzadeh A , Safarinejadian B . Distributed estimation and control for nonlinear multi-agent systems in the presence of input delay or external disturbances. ISA Transactions, 2020, 98, 198- 206
doi: 10.1016/j.isatra.2019.08.059 |
| 17 |
Xiao W B , Cao L , Li H Y , Lu R Q . Observer-based adaptive consensus control for nonlinear multi-agent systems with time-delay. Science China Information Sciences, 2020, 63, 132202
doi: 10.1007/s11432-019-2678-2 |
| 18 |
Zou W C , Xiang Z R . Event-triggered leader-following consensus of non-linear multi-agent systems with switched dynamics. IET Control Theory and Applications, 2019, 13 (9): 1222- 1228
doi: 10.1049/iet-cta.2018.5126 |
| 19 |
Dong X W , Meng F L , Shi Z Y , et al. Output containment control for swarm systems with general linear dynamics: A dynamic output feedback approach. Systems and Control Letters, 2014, 71, 31- 37
doi: 10.1016/j.sysconle.2014.06.007 |
| 20 |
Zhou F , Wang Z J . Containment control of linear multi-agent systems with directed graphs and multiple leaders of time-varying bounded inputs. IET Control Theory and Applications, 2015, 9 (16): 2466- 2473
doi: 10.1049/iet-cta.2014.0634 |
| 21 |
Zou W C , Xiang Z R . Event-triggered distributed containment control of heterogeneous linear multi-agent systems by an output regulation approach. International Journal of Systems Science, 2017, 48 (10): 2041- 2054
doi: 10.1080/00207721.2017.1309595 |
| 22 |
Zou W C , Xiang Z R . Event-triggered containment control of second-order nonlinear multi-agent systems. Journal of the Franklin Institute, 2019, 356 (17): 10421- 10438
doi: 10.1016/j.jfranklin.2018.05.060 |
| 23 |
Lu H , He W L , Han Q L , et al. Finite-time containment control for nonlinear multi-agent systems with external disturbances. Information Sciences, 2020, 512, 338- 351
doi: 10.1016/j.ins.2019.05.049 |
| 24 | Fu Q , Du L L , Xu G Z , Wu J R , Yu P F . Consensus control for multi-agent systems with distributed parameter models. Neurocomputing, 2018, 308 (25): 58- 64 |
| 25 | Fu Q , Yu P F , Xu G Z . Containment control for partial differerntial multi-agent systems. Physica A, 2019, 529 (01): 121549: 11 |
| 26 | Fu Q , Du L L , Xu G Z , Wu J R . Consensus control for multi-agent systems with distributed parameter models via iterative learning algorithm. Journal of the Franklin Institute, 2018, 355 (10): 4453- 4472 |
| 27 | Dai X S , Wang C , Tian S P , Huang Q N . Consensus control via iterative learning for distributed parameter models multi-agent systems with time-delay. Journal of the Franklin Institute, 2019, 356 (10): 5240- 5259 |
| 28 |
郁鹏飞, 傅勤, 陈振杰, 张丹. 四阶偏微分多智能体系统的迭代学习控制. 数学物理学报, 2020, 40A (4): 1029- 1042
doi: 10.3969/j.issn.1003-3998.2020.04.018 |
|
Yu P F , Fu Q , Chen Z J , Zhang D . Iterative learning control for fourth order partial differential multi-agent systems. Acta Mathematica Scientia, 2020, 40A (4): 1029- 1042
doi: 10.3969/j.issn.1003-3998.2020.04.018 |
|
| 29 |
Fu Q . Iterative learning control for nonlinear heterogeneous multi-agent systems with multiple leaders. Transactions of the Institute of Measurement and Control, 2021, 43 (4): 854- 861
doi: 10.1177/0142331220941636 |
| 30 |
Huang D Q , Xu J X , Li X F , et al. D-type anticipatory iterative learning control for a class of inhomogeneous heat equations. Automatica, 2013, 49 (8): 2397- 2408
doi: 10.1016/j.automatica.2013.05.005 |
| [1] | He Zerong, Han Mengjie. Optimal Control of Initial Distributions in a Hierarchical Size-Structured Population System with Delay [J]. Acta mathematica scientia,Series A, 2021, 41(4): 1181-1191. |
| [2] | Pengfei Yu,Qin Fu. Iterative Learning Control for Fourth Order Partial Differential Multi-Agent Systems [J]. Acta mathematica scientia,Series A, 2020, 40(4): 1029-1042. |
| [3] | Ge Yanrong, Qi Yaohui, Chen Yangzhou, Song Xuejun. Consensus of High-Order Discrete-Time Multi-Agent Systems with Quantized Information [J]. Acta mathematica scientia,Series A, 2017, 37(6): 1176-1188. |
| [4] | Xiong Jun, Li Junmin, He Chao. Fuzzy Boundary Control Design for a Class of First-Order Hyperbolic PDEs [J]. Acta mathematica scientia,Series A, 2017, 37(3): 469-477. |
| [5] | Gao Lingyun. Algebroid Solutions of Higher-Order Partial Differential Equations on Cm [J]. Acta mathematica scientia,Series A, 2008, 28(5): 856-862. |
| [6] |
Ran Qikang.
Existence of Weak Solutions to a Class of Elliptic Stochastic Partial Differential Equations [J]. Acta mathematica scientia,Series A, 2008, 28(2): 320-328. |
| Viewed | ||||||||||||||||||||||||||||||||||||||||||||||
|
Full text 119
|
|
|||||||||||||||||||||||||||||||||||||||||||||
|
Abstract 93
|
|
|||||||||||||||||||||||||||||||||||||||||||||
Cited |
|
|||||||||||||||||||||||||||||||||||||||||||||
| Shared | ||||||||||||||||||||||||||||||||||||||||||||||
| Discussed | ||||||||||||||||||||||||||||||||||||||||||||||
|