基于迭代学习算法的偏微分多智能体系统的包容控制
Containment Control for Partial Differential Multi-Agent Systems via Iterative Learning Algorithm
基于迭代学习算法的偏微分多智能体系统的包容控制 |
| 张丹,傅勤,陈振杰 |
|
Containment Control for Partial Differential Multi-Agent Systems via Iterative Learning Algorithm |
| Dan Zhang,Qin Fu,Zhenjie Chen |
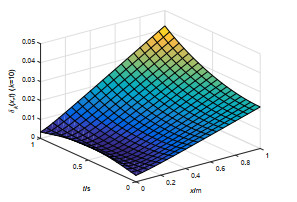
| 图 3 抛物型包容误差曲面( |
|
|